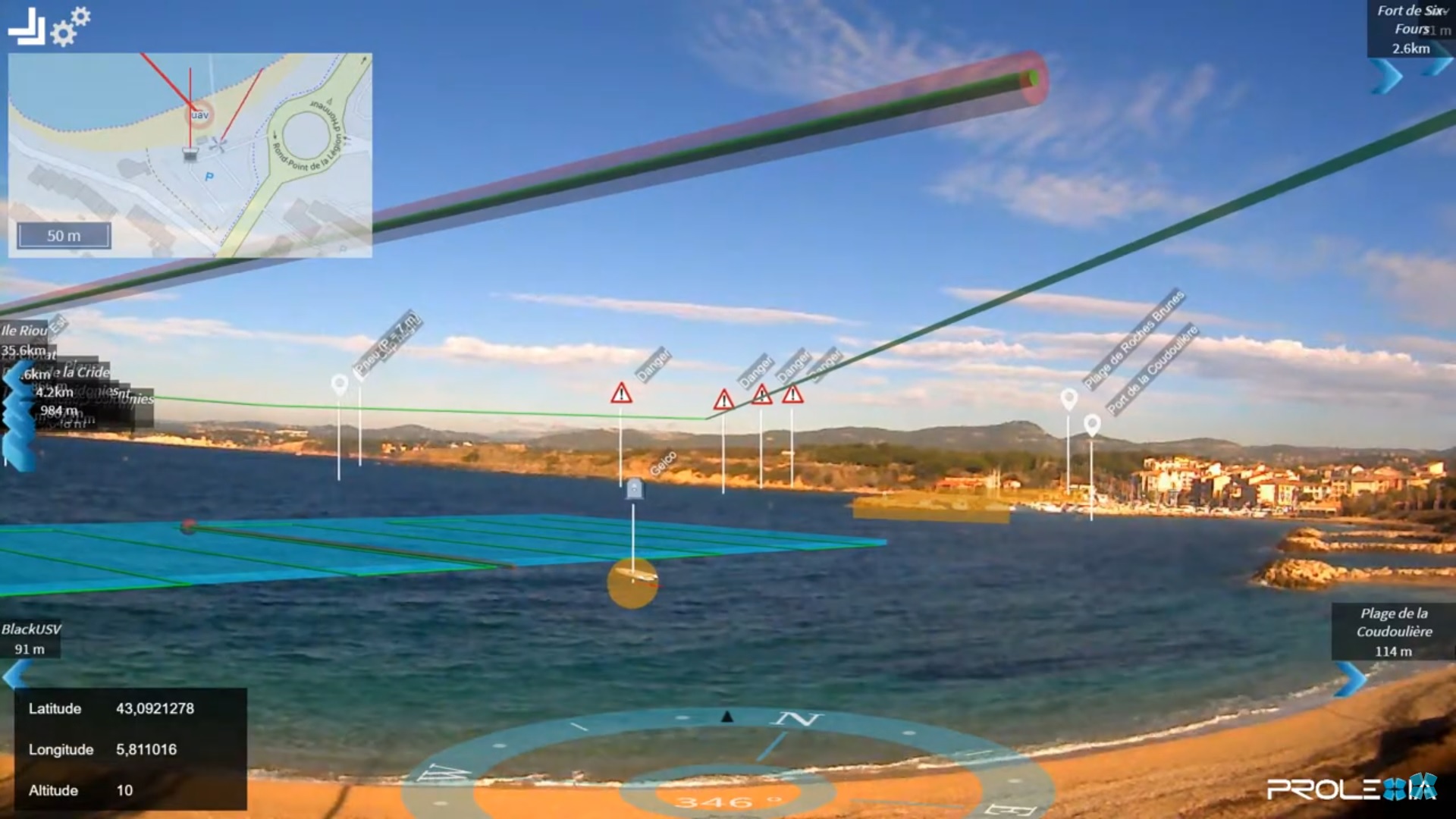
L’outil Advansys MMS permet de programmer, de superviser, de simuler et d’analyser une mission mettant en oeuvre un ou plusieurs véhicules autonomes de type AUV, USV, UGV ou UAV. L’objectif est de gérer les missions de véhicules pouvant intervenir sur des missions de surveillance de zones ou de l’environnement, sur des tâches de maintenance ou de manipulation complexes. L’outil possède plusieurs modules : programmation, simulation, supervision, analyse, qui peuvent être combinés et adaptés afin de répondre au mieux à des besoins spécifiques.
Cette programmation permet de prendre automatiquement en compte les contraintes liées à l’environnement (terrain), au robot (contraintes de vitesse par exemple) et à ses charges utiles.
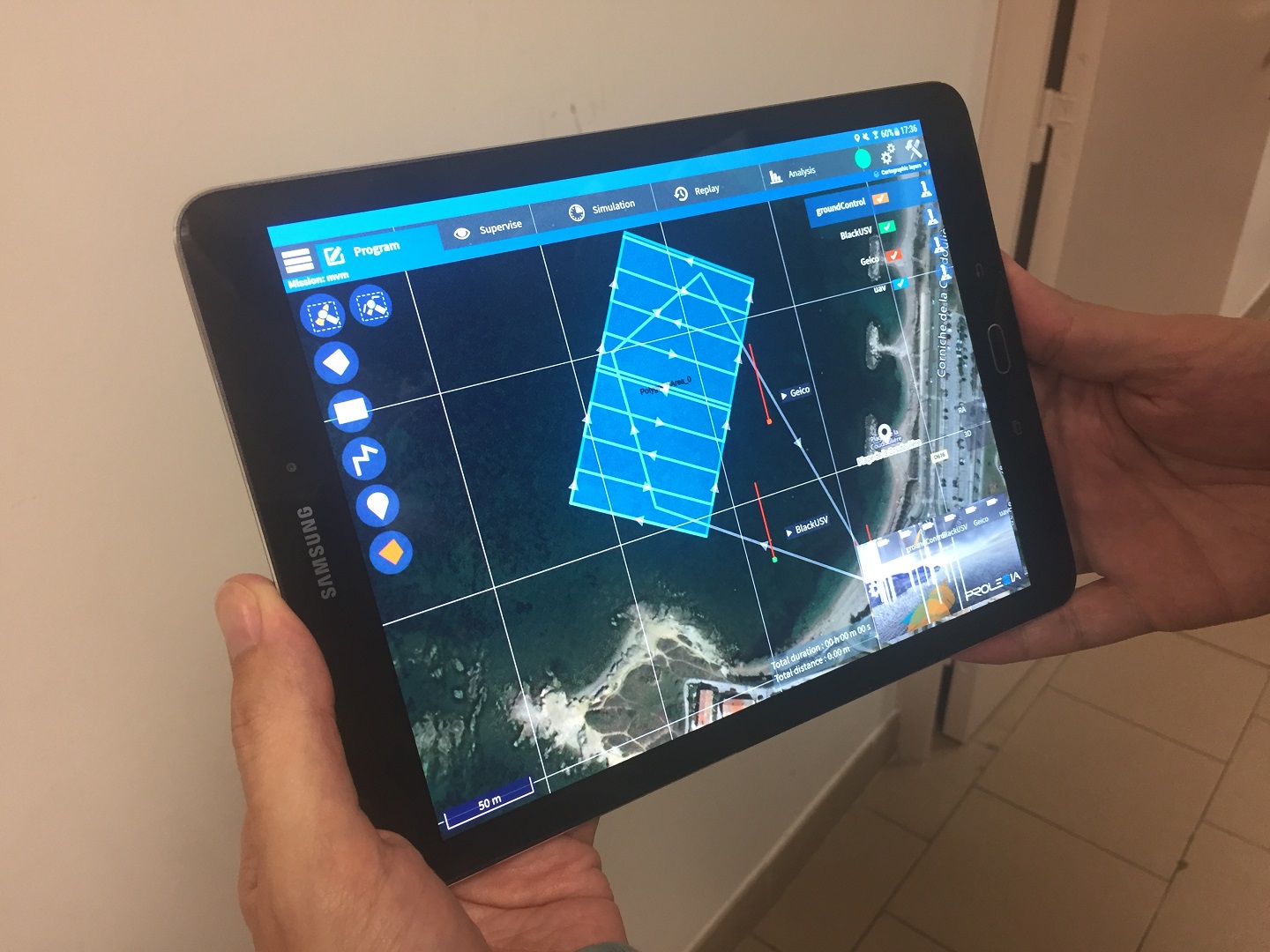
Le programme est défini en plusieurs étapes :
configuration du ou des robots participant à la mission: sélection et paramétrage des charges utiles, réglage de l’autonomie, définition des contraintes d’utilisation (min/max).
planification de la mission du robot, de la phase de lancement jusqu’à sa récupération. Cette mission est définie à partir de tâches de base :
Suivi de waypoints
Traitement de zones
Prises de vues
Manipulation ou récolte d’objets
Suivi de mur ou de colline
L’outil détermine automatiquement les tâches de transition nécessaires à l’exécution de la mission créée. Cette programmation permet de générer le plan de mission qui sera téléchargé sur le véhicule.