
Produits et développements sur mesure
Robotique
PROLEXIA conçoit et fabrique des véhicules autonomes pouvant exécuter divers types de missions sur mesure comme la surveillance d’un site, l’automatisation de mesures d’un environnement ou tâches simples dans un environnement hostile pour l’homme). Ces robots se basent sur un socle commun et son équipés de divers capteurs ou charges utiles en fonction des tâches à exécuter.
Ces engins autonomes intelligents peuvent exécuter des missions complexes grâce à leurs contrôleurs embarqués intégrant le logiciel de pilotage du véhicule développé par PROLEXIA : Advansys. La mission est définie à l’aide d’un langage de description de mission robotique générique qui peut être généré par l’outil Advansys MMS.
Ces contrôleurs peuvent être utilisés en 3 modes:
- Exécution automatique de la Mission générée par MMS : exécution d’un langage de description de mission robotique générique
- Pilotage à distance via un joystick, un smartphone ou une tablette avec une assistance au pilotage en réalité augmentée
- Combinaison des deux modes décrits ci-dessus: mission autonome avec possibilité de prendre le contrôle à tout moment

Conversion autonome
Navigation autonome
Advansys MMS
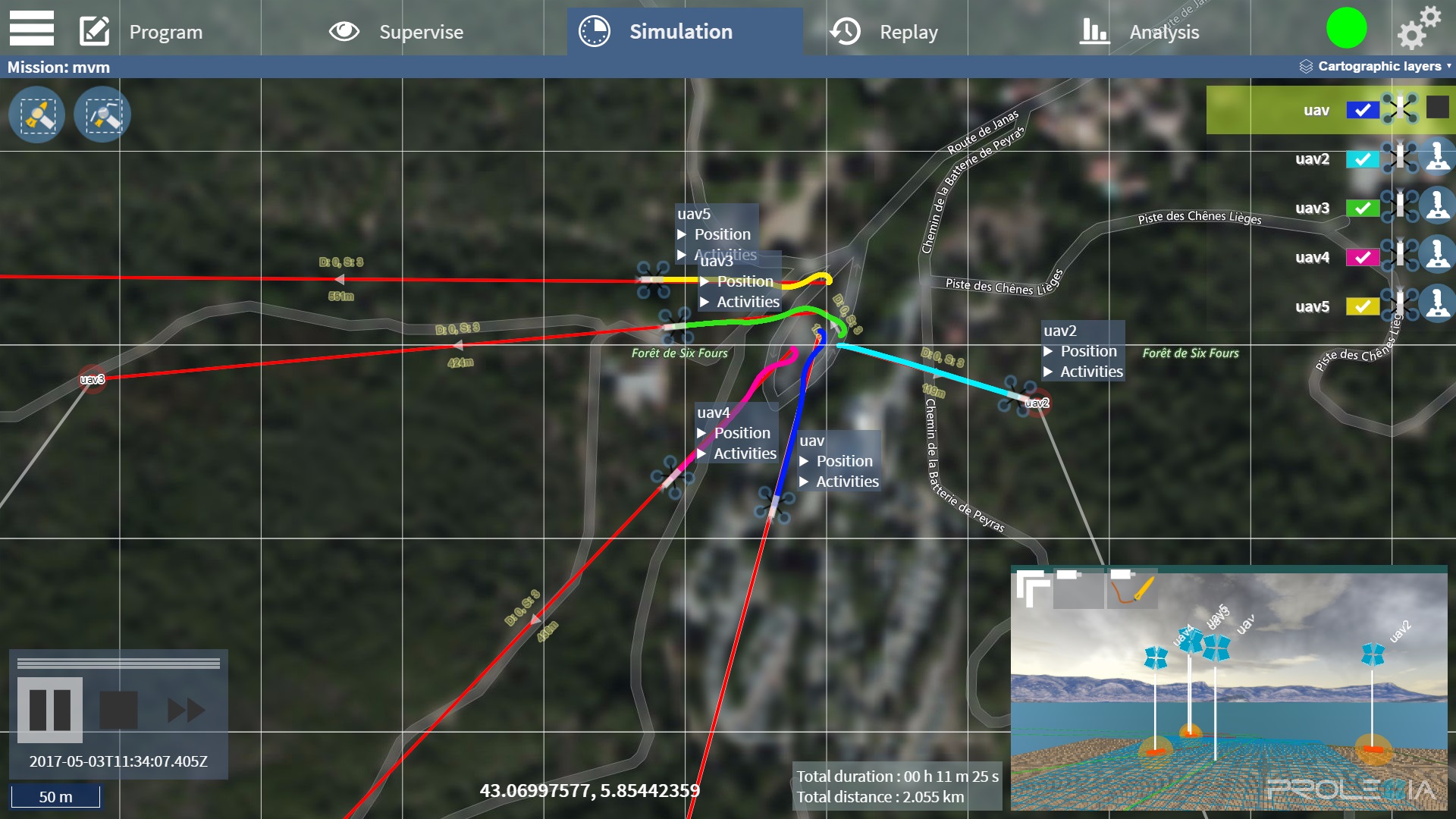
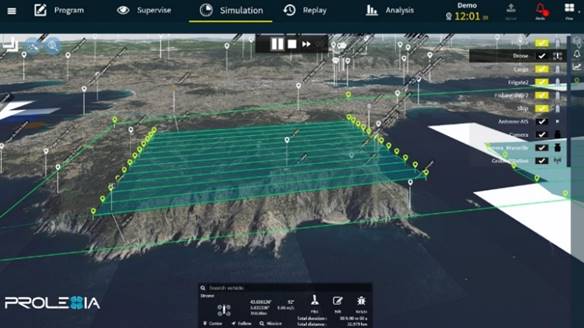
Dédiées à tous les utilisateurs voulant préparer et programmer efficacement la mission de leurs robots, les capacités de planification et de simulation de mission de Prolexia représentent la prochaine génération dans la planification de mission complète et user-friendly.En utilisant la technologie de la plateforme Advansys de PROLEXIA, les clients utilisant Advansys MMS peuvent désormais :
- Programmer / Superviser / Simuler des missions complexes et collaboratives entre divers types de véhicules
- Visualiser les états (flux vidéos des caméras ou données lidar par exemple) des capteurs installés sur les véhicules
- Contrôler et superviser les états du véhicule, les charges utiles et les capteurs pour adopter tous les paramètres des missions plus facilement
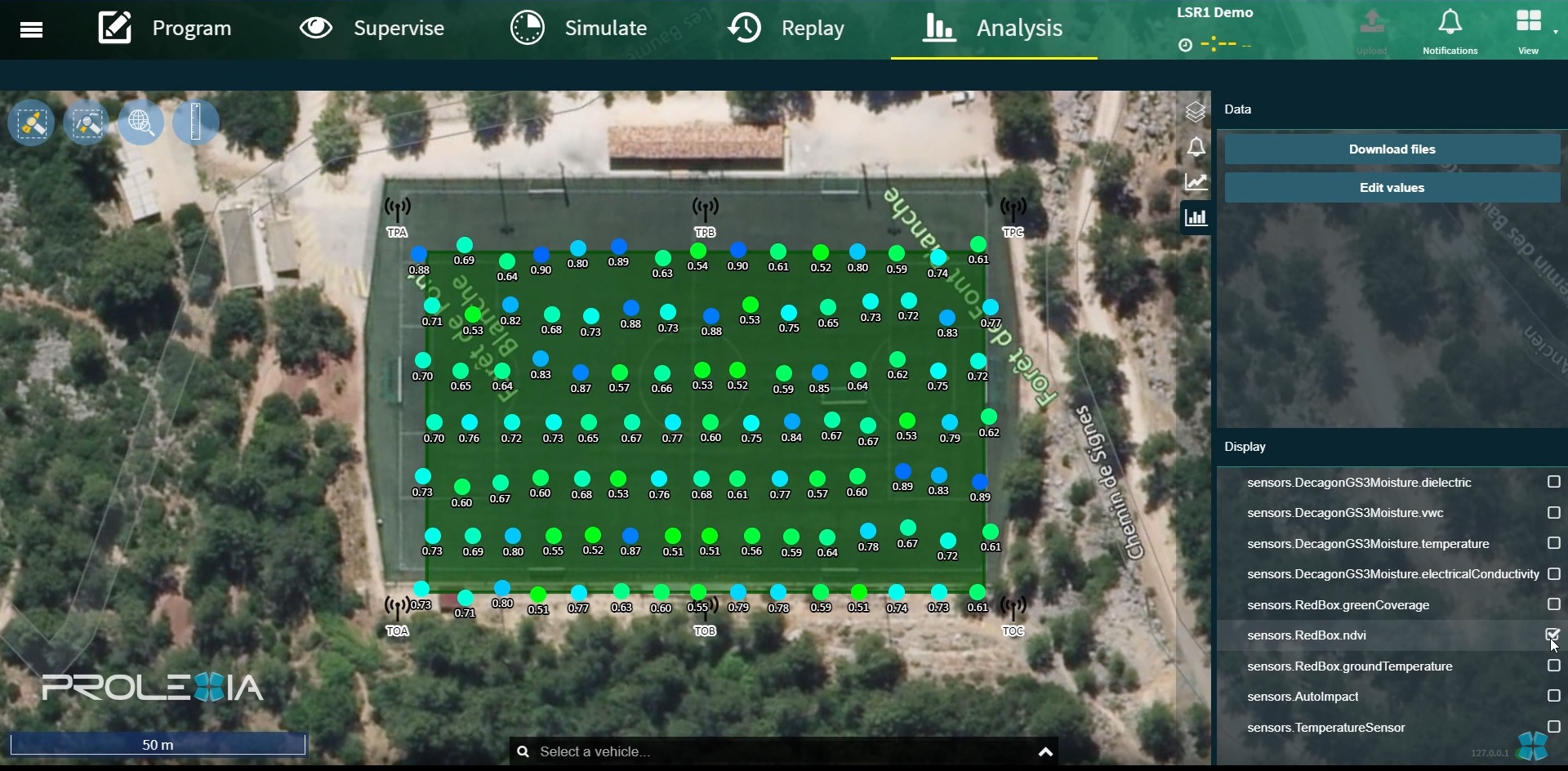
- Analyser les données post-mission pour examiner les missions de manière détaillée, préparer le traitement des données et améliorer le retour d’expérience
- Télépiloter différents types de véhicules
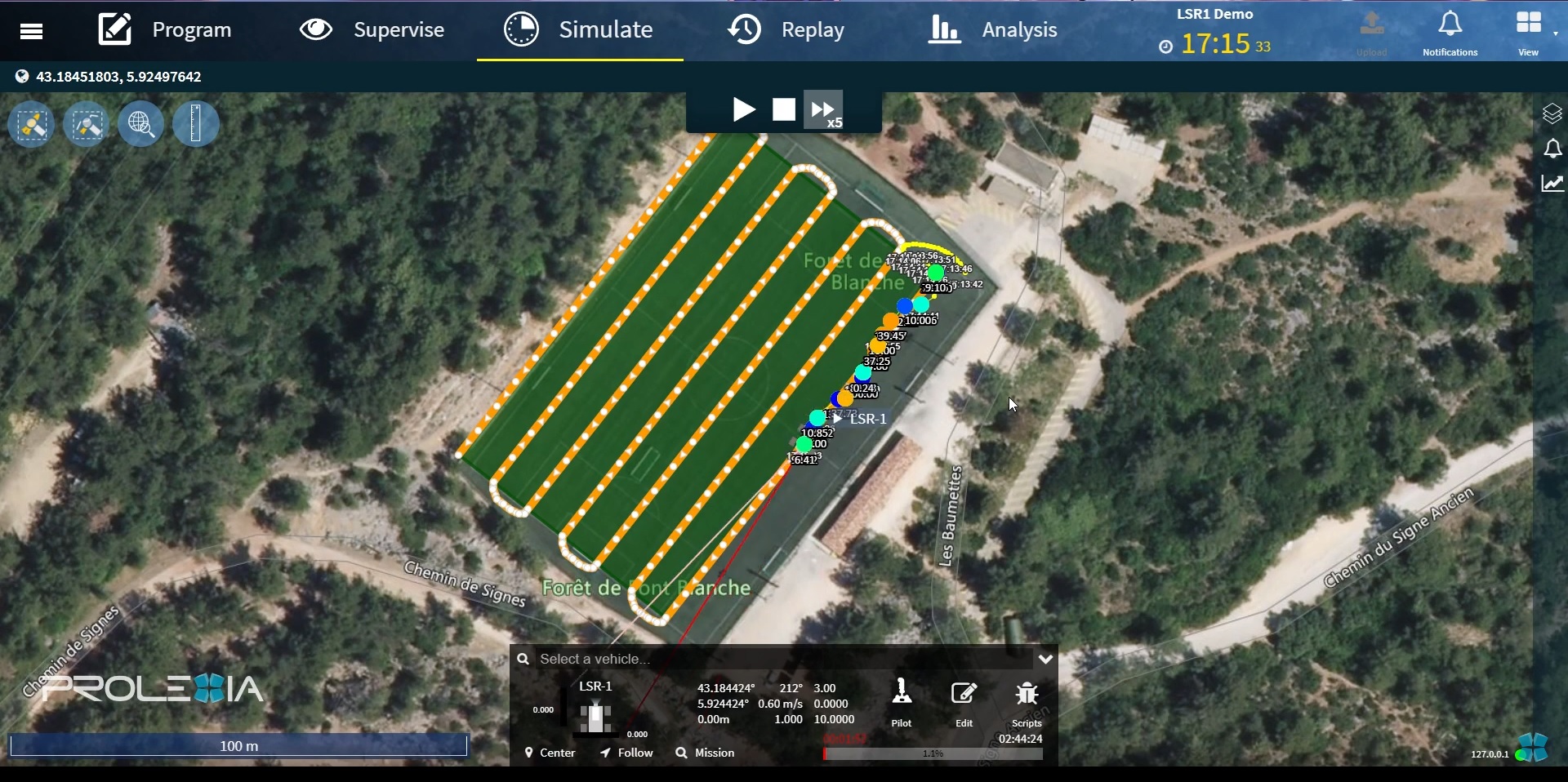
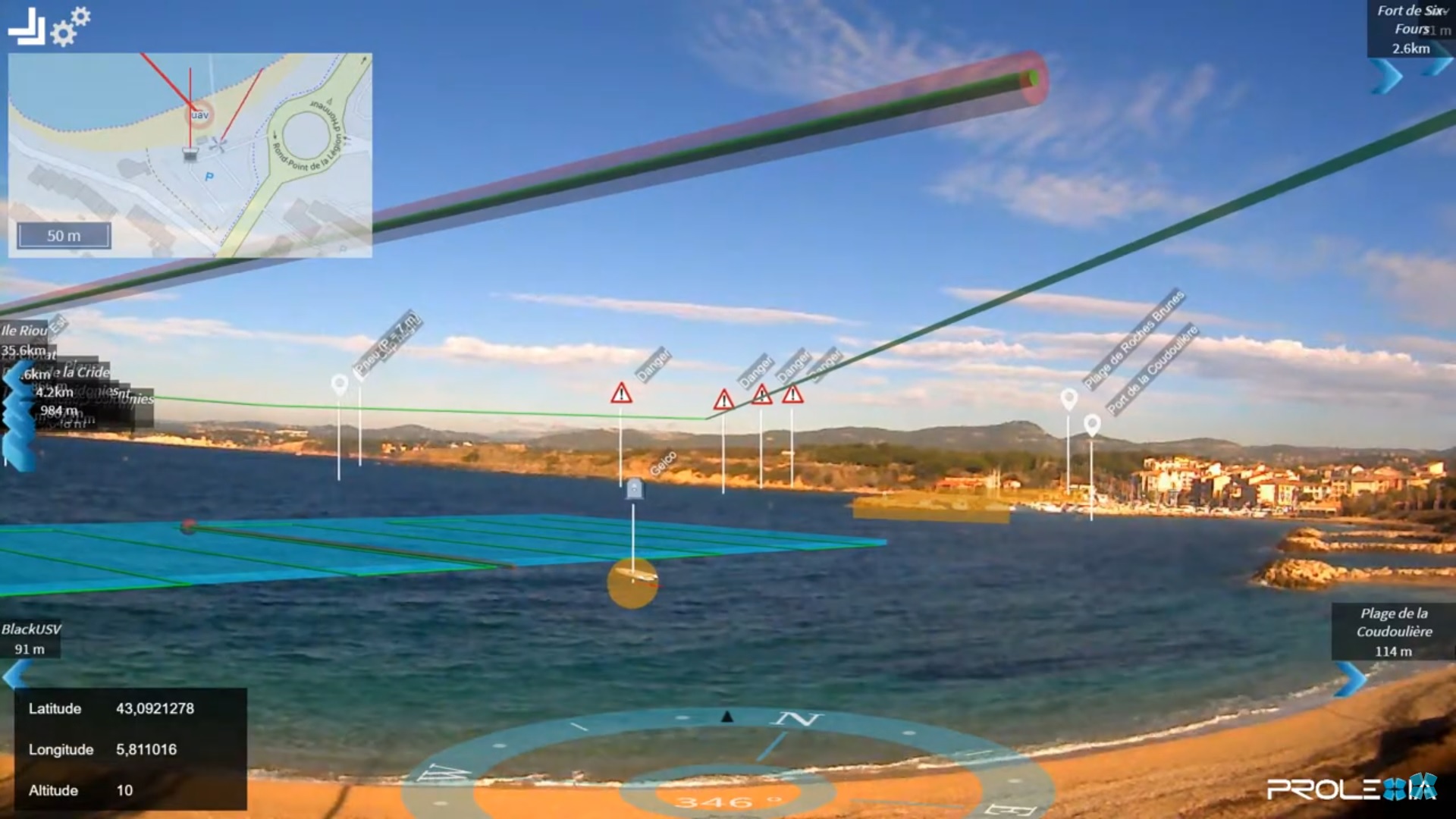
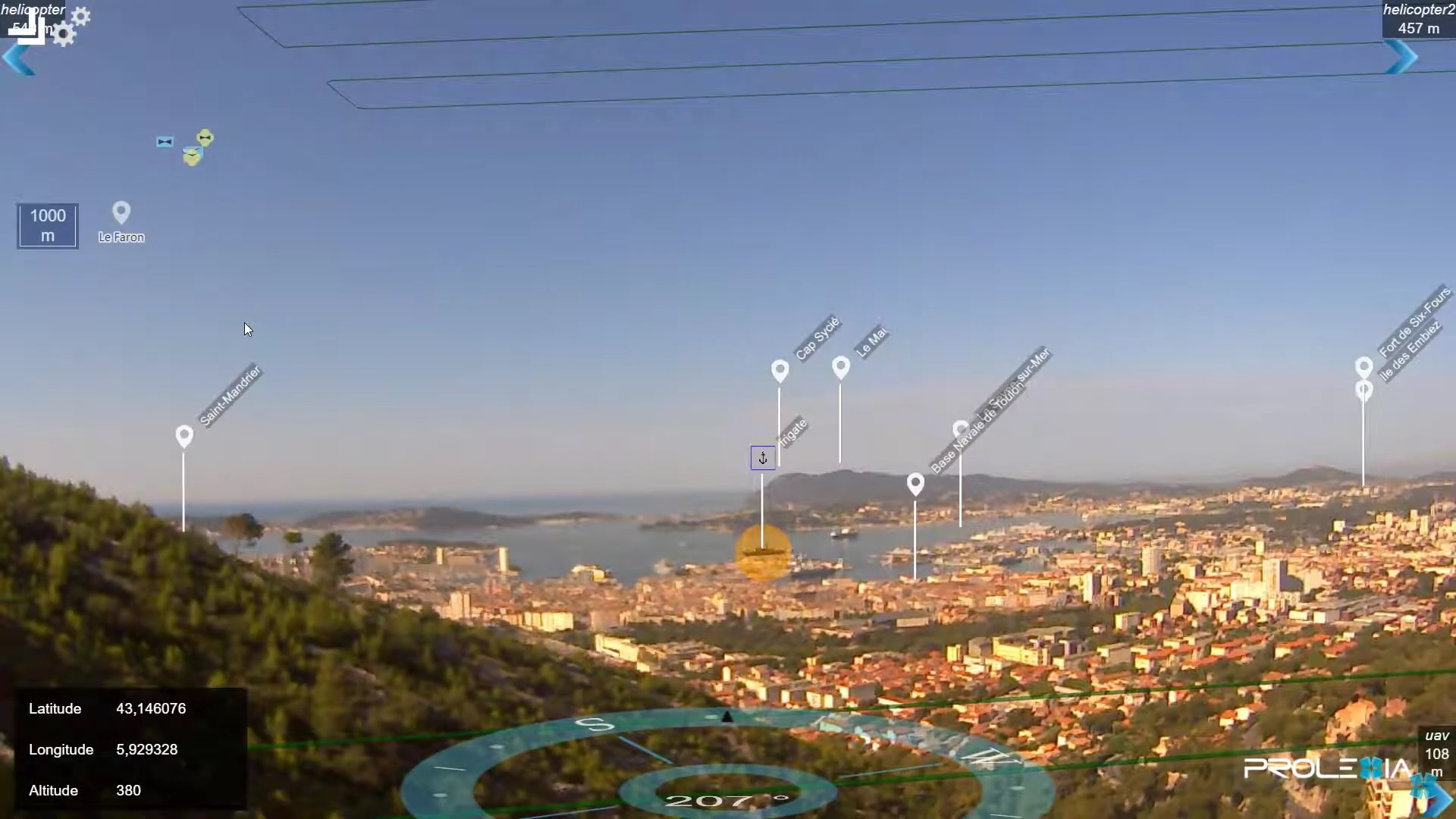
- Suivre le déroulement de la mission via des interfaces 2D et 3D
- Visualiser l’exécution de la mission en réalité augmentée
- Mener des simulations réalistes afin de valider les performances avant de mobiliser des ressources, de réduire les coûts et d’améliorer la fiabilité


Robots terrestres





Véhicules marins/sous-marins





OSCAR
Oscar est un robot de surveillance autonome avec une capacité de détection augmentée de jour comme de nuit pour élever le niveau de sûreté et de sécurité de sites sensibles. Il est entièrement développé par la société PROLEXIA pour répondre aux besoins de la société ONET sécurité.
Red Robin
Le robot Red Robin embarque des équipements de mesures divers afin d’automatiser la mesure de qualité d’un terrain de sport et ainsi assister les technicien chargés de ce contrôle. Il est entièrement développé par la société PROLEXIA pour répondre aux besoins de la société Labosport.
Cast House Robot "Fasolt"
Ce robot autonome est utilisé pour effectuer des tâches de maintenance, de mesure et de surveillance des hauts fourneaux. Il est protégé contre les radiations thermiques et possède un bras qui va équipé d’outils interchangeables: fraises, pince pour l’échantillonnage et la mesure.
Advansys MMS
L’outil Advansys MMS permet de programmer, de superviser, de simuler et d’analyser une mission mettant en oeuvre un une plusieurs véhicules autonomes de type AUV, USV, UGV ou UAV.
Sherpa
SHERPA est un système de livraison de colis par drones en zone difficile d’accès ou en altitude, réalisé en collaboration avec Atechsys Engineering. Le système est supervisé à distance à l’aide de l’application Cockpit, outil de programmation, de simulation et de suivi de mission basé sur la plateforme Advansys MMS réalisée par PROLEXIA.
MUSOT
TECTONIC
Le projet TECTONIC favorisera une collaboration intersectorielle entre les professionnels académiques et non académiques travaillant sur différents sujets liés aux UCH pour répondre et trouver des solutions aux problèmes complexes qui existent toujours. dans le domaine de l’UCH.