
Customised products and developments
Robotics
PROLEXIA conçoit et fabrique des véhicules autonomes pouvant exécuter divers types de missions sur mesure comme la surveillance d’un site, l’automatisation de mesures d’un environnement ou tâches simples dans un environnement hostile pour l’homme). Ces robots se basent sur un socle commun et son équipés de divers capteurs ou charges utiles en fonction des tâches à exécuter.
Ces engins autonomes intelligents peuvent exécuter des missions complexes grâce à leurs contrôleurs embarqués intégrant le logiciel de pilotage du véhicule développé par PROLEXIA : Advansys. La mission est définie à l’aide d’un langage de description de mission robotique générique qui peut être généré par l’outil Advansys MMS.
This controller can be used in 3 modes:
- Execution of the Mission generated by the MMS : execution of Generic Robotic Mission Language
- Remote Operation via a joystick, smartphone or a tablet with augmented reality assistance
- Combinaison des deux modes décrits ci-dessus: mission autonome avec possibilité de prendre le contrôle à tout moment

Conversion autonome
Navigation autonome
Advansys MMS
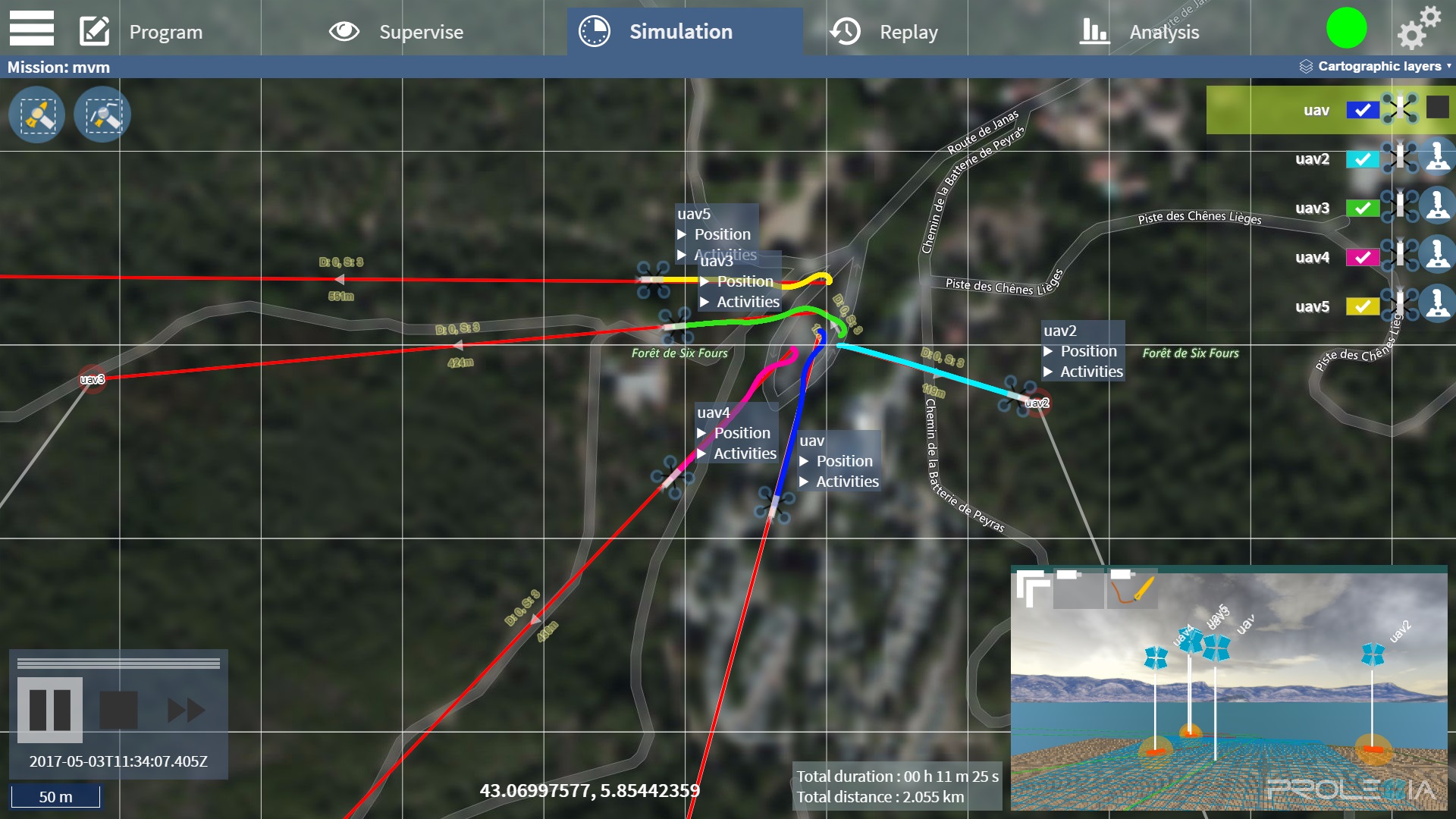
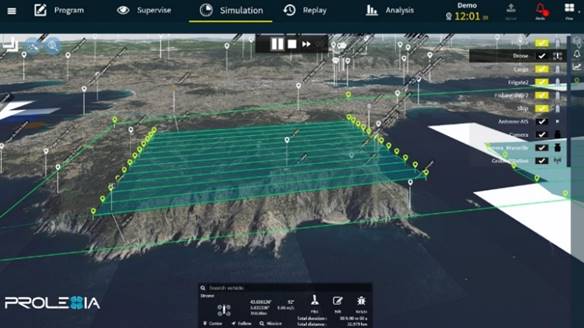
Dédiées à tous les utilisateurs voulant préparer et programmer efficacement la mission de leurs robots, les capacités de planification et de simulation de mission de Prolexia représentent la prochaine génération dans la planification de mission complète et user-friendly.En utilisant la technologie de la plateforme Advansys de PROLEXIA, les clients utilisant Advansys MMS peuvent désormais :
- Programmer / Superviser / Simuler des missions complexes et collaboratives entre divers types de véhicules
- Visualiser les états (flux vidéos des caméras ou données lidar par exemple) des capteurs installés sur les véhicules
- Contrôler et superviser les états du véhicule, les charges utiles et les capteurs pour adopter tous les paramètres des missions plus facilement
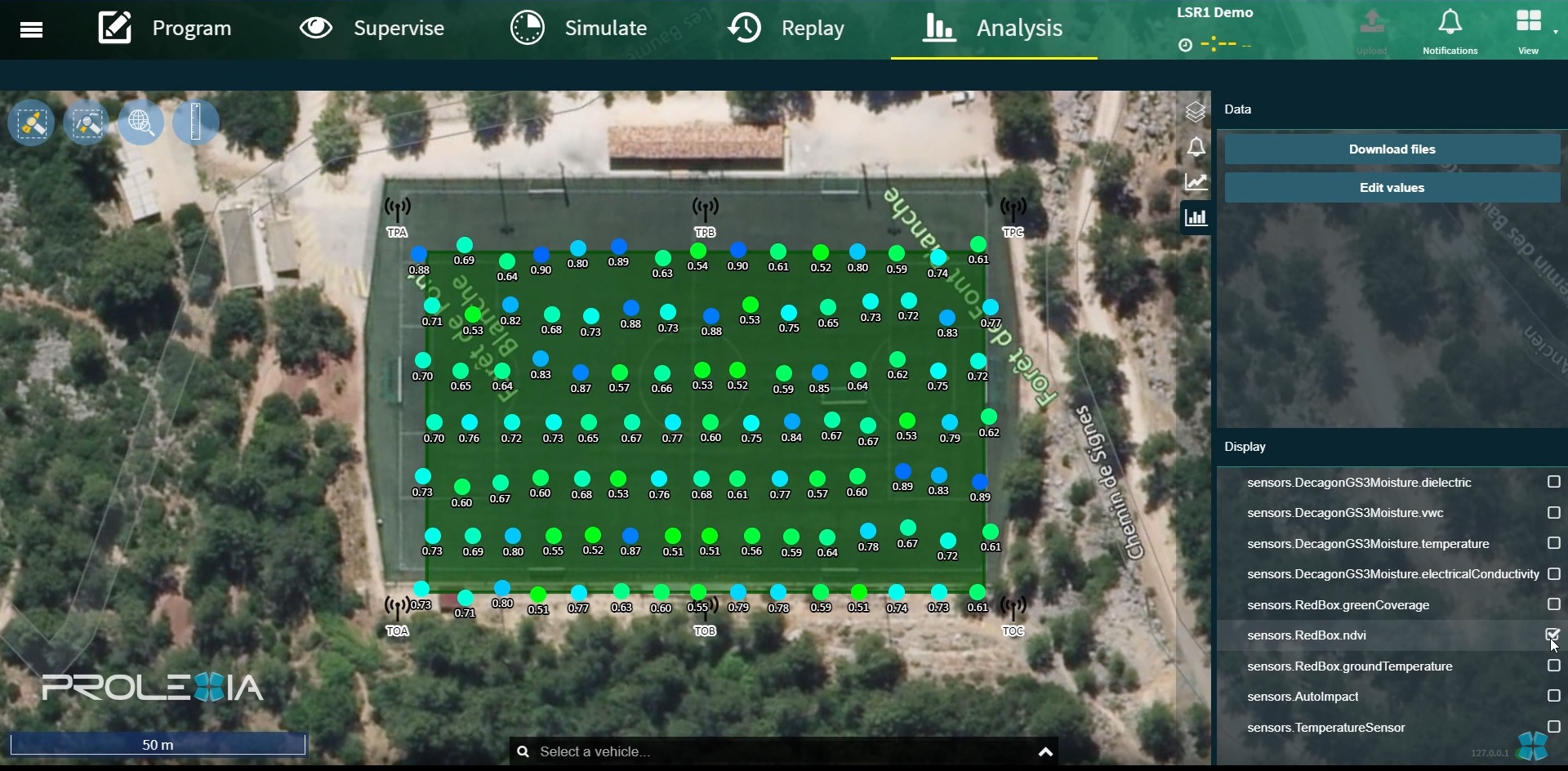
- Analyser les données post-mission pour examiner les missions de manière détaillée, préparer le traitement des données et améliorer le retour d’expérience
- Télépiloter différents types de véhicules
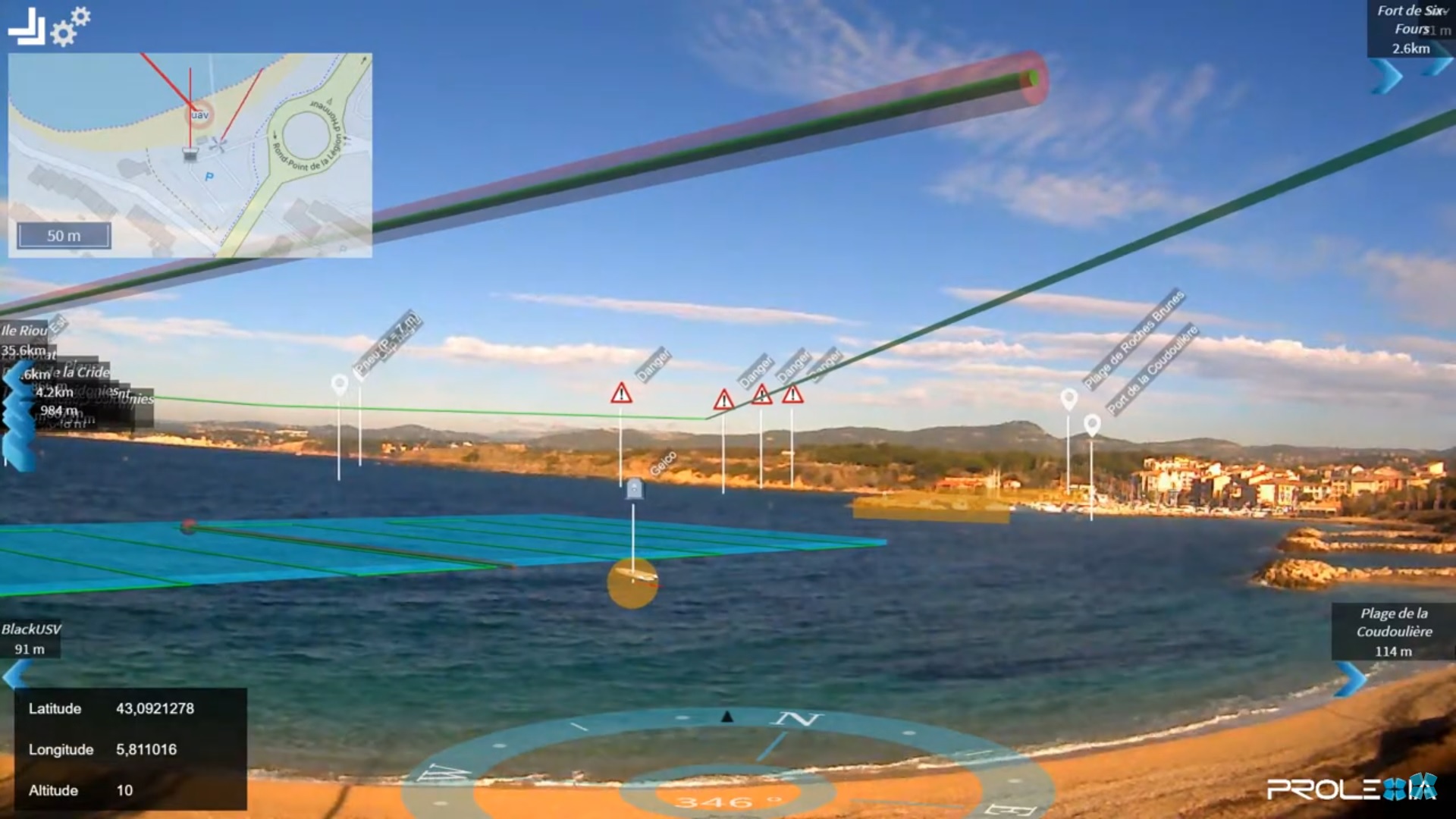
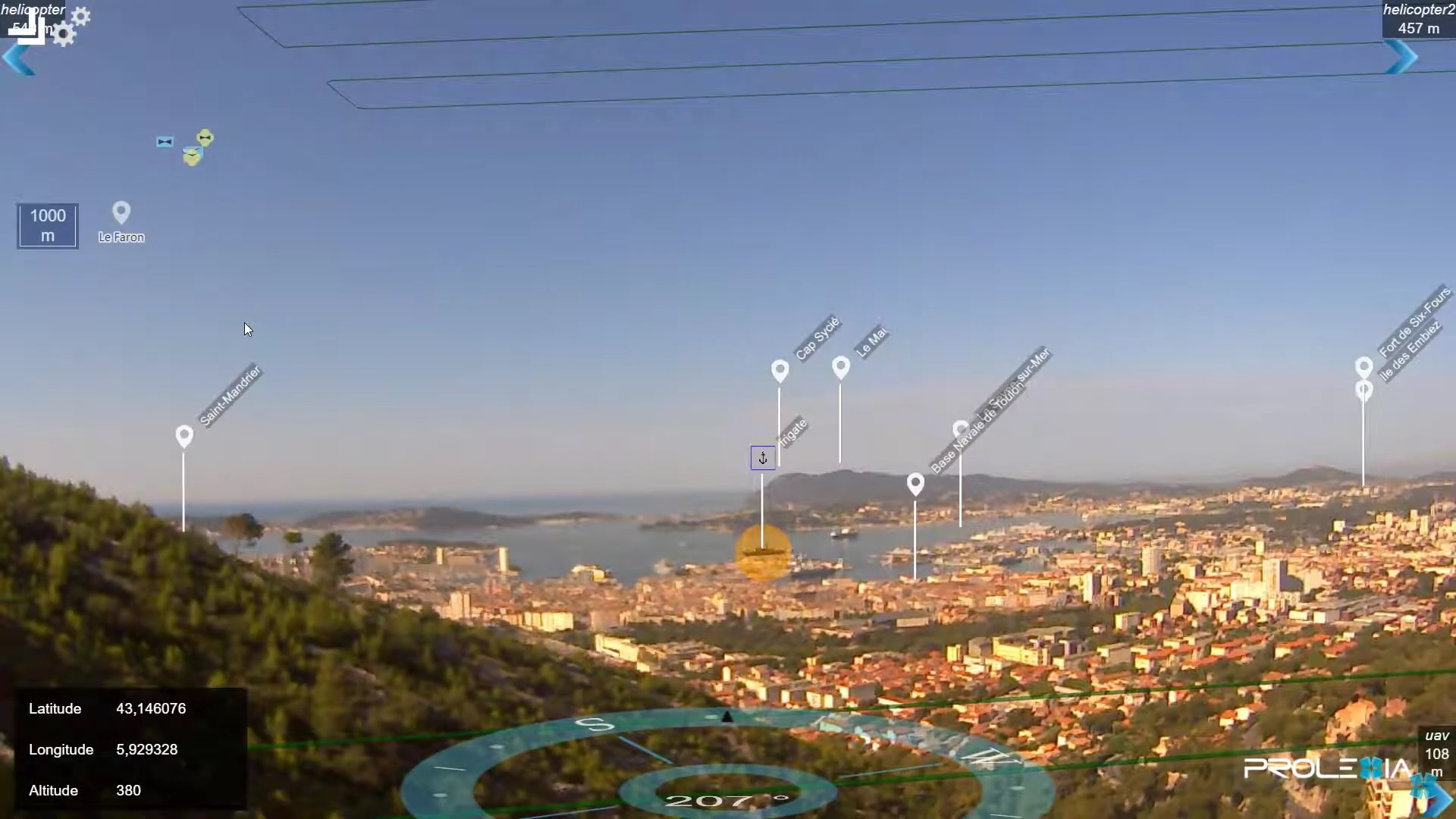
- Suivre le déroulement de la mission via des interfaces 2D et 3D
- Visualiser l’exécution de la mission en réalité augmentée
- Mener des simulations réalistes afin de valider les performances avant de mobiliser des ressources, de réduire les coûts et d’améliorer la fiabilité


Robots terrestres





Marine/submarine vehicles





OSCAR
Oscar est un robot de surveillance autonome avec une capacité de détection augmentée de jour comme de nuit pour élever le niveau de sûreté et de sécurité de sites sensibles. Il est entièrement développé par la société PROLEXIA pour répondre aux besoins de la société ONET sécurité.
Red Robin
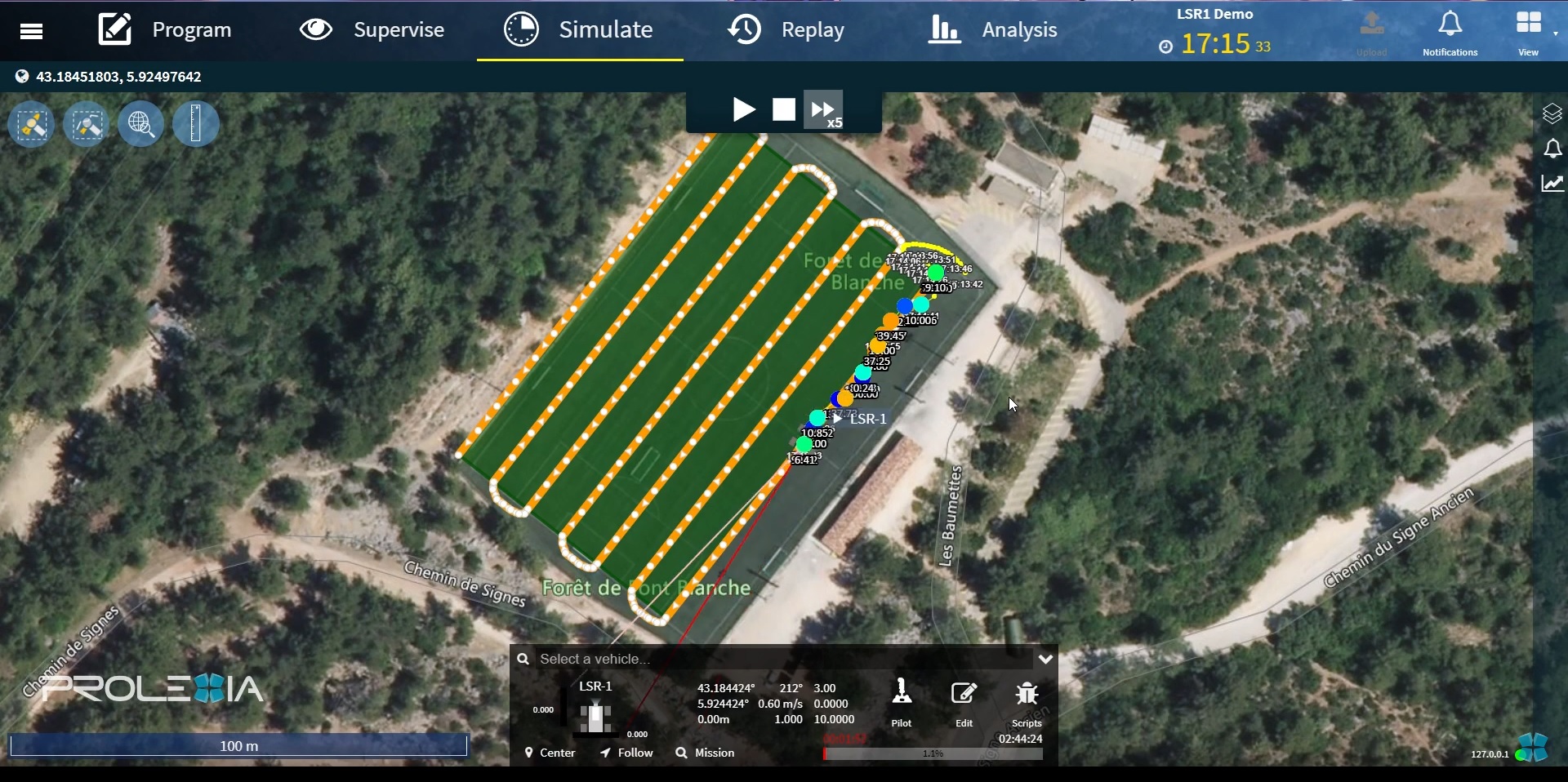
Le robot Red Robin embarque des équipements de mesures divers afin d’automatiser la mesure de qualité d’un terrain de sport et ainsi assister les technicien chargés de ce contrôle. Il est entièrement développé par la société PROLEXIA pour répondre aux besoins de la société Labosport.
Cast House Robot "Fasolt"
Ce robot autonome est utilisé pour effectuer des tâches de maintenance, de mesure et de surveillance des hauts fourneaux. Il est protégé contre les radiations thermiques et possède un bras qui va équipé d’outils interchangeables: fraises, pince pour l’échantillonnage et la mesure.
Advansys MMS
The Advansys MMS tool allows you to program, survey, simulate and analyze a mission that has been put into place with one or several types of autonomous vehicles such as AUVs, USVs, UGVs, or UAVs.
Sherpa
SHERPA is a drone delivery system in difficult to access areas, made in collaboration with Atechsys Engineering. The system is remotely operated with the Cockpit software based upon the Advansys MMS mission management and simulation platform made by PROLEXIA.
MUSOT
TECTONIC
TECTONIC project will promote an intersectoral collaboration between academic and non-academic professionals working in different topics related to the UCHs to respond and find solutions to the complex issues still existing in the field of UCH.