The DockAUV tool allows to program, supervise, simulate and analyse a mission using an AUV (Autonomous Underwater Vehicle) and its Docking station. The purpose is to handle those missions with AUV used for zones or environment surveillance missions or for maintenance tasks. This tool was made in the context of missions using the Docking station developed by DCNS and the AUV of the company RTSYS. This software is based on the generic Mission Management System tool developed by PROLEXIA.
The mission programming editor permits to set up the system and the task the AUV has to complete. It automatically takes into account the environment (field), the AUV (speed and immersion for instance) and its docking station (approach distance and waiting circle) constraints.
This program is made with several steps :
Docking Station's set up :
position and orientation
Configuration and control of its operation: attitude, exit / retraction of the hunting cylinder, opening and closing of the hood, recharging of the batteries by induction, conservation by oil filling
AUV's set up : selection and payloads' set up, setting of the autonomy, definition of the constraints of use (min/max)
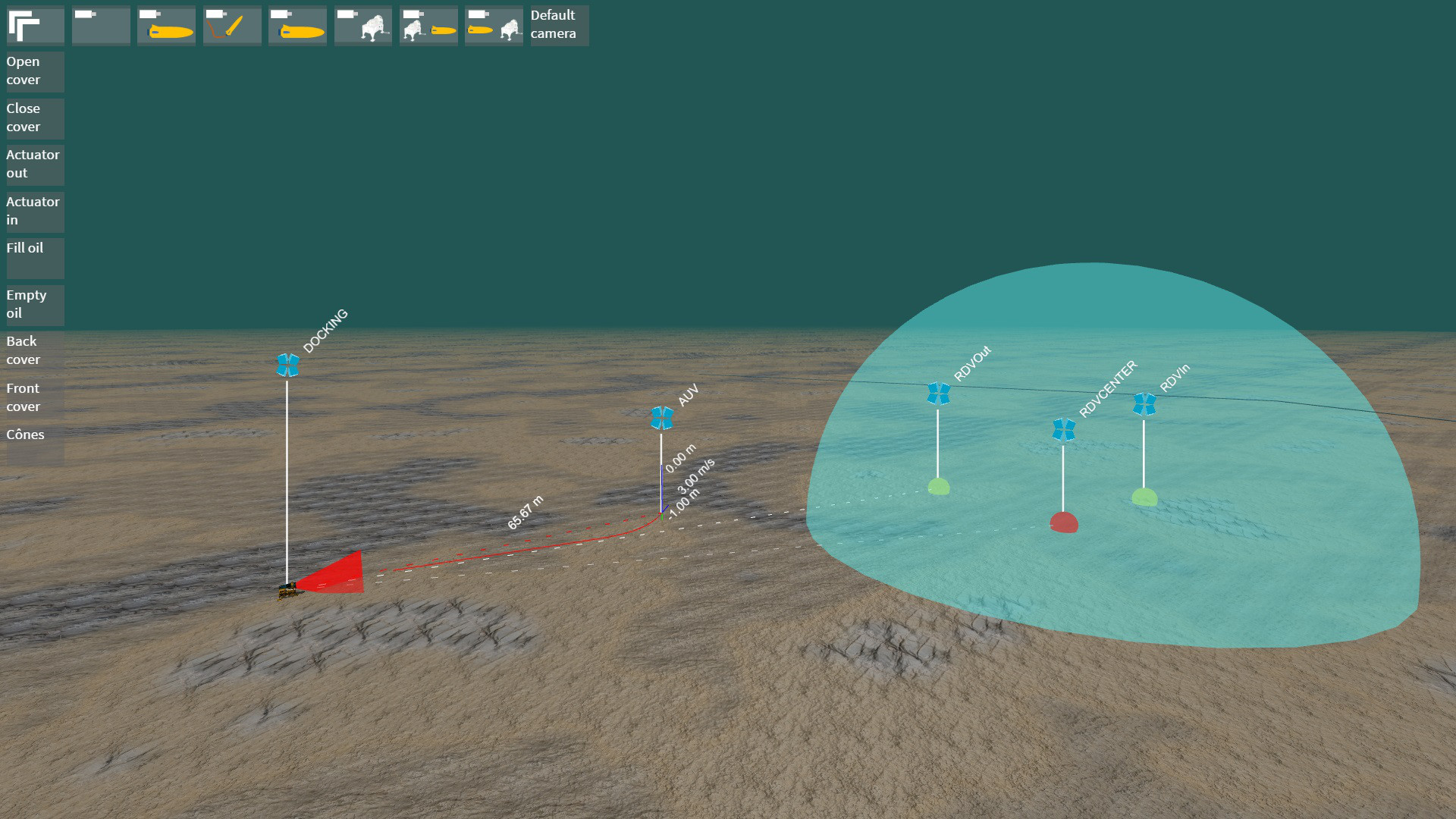
AUV's mission planning, from the launch phase from the docking station to its recovery. This mission's definition is based on tasks :
follow waypoints
zones treatment
This tool determinate automatically the transition tasks between the docking station and the created mission. That program prepare the pilotage phases of the docking station's sequences et allows to generate the mission plan downloaded on the vehicle.