L’outil DockAUV permet de programmer, de superviser, de simuler et d’analyser une mission mettant en œuvre un AUV (Autonomous Underwater Vehicle) et sa station de Docking. L’objectif est de gérer les missions d’AUV pouvant intervenir sur des missions de surveillance de zones ou de l’environnement ou sur des tâches de maintenance. Cet outil a été mis en œuvre dans le cadre de missions utilisant la station de Docking développée par DCNS et l’AUV de la société RTSYS. Il est basé sur l’outil générique de gestion de mission de véhicules autonomes Advansys MMS développé par PROLEXIA.
Le module de programmation de mission assiste l’utilisateur dans la configuration du système et la création des tâches que devra exécuter l’AUV. L’éditeur de programmation de mission permet de configurer le système et les tâches que devra exécuter l’AUV. Il permet de prendre automatiquement en compte les contraintes liées à l’environnement (terrain), à l’AUV (contraintes de vitesse et d’immersion par exemple) et à sa station de docking (distance d’approche et cercle d’attente).
Cette programmation se fait en plusieurs étapes :
Configuration de la station de Docking :
positionnement et orientation
configuration et contrôle de son fonctionnement : attitude, sortie/rentrée du vérin de chasse, ouverture et fermeture du capot, rechargement des batteries par induction, conservation par remplissage d’huile
configuration de l’AUV : sélection et paramétrage des charges utiles, réglage de l’autonomie, définition des contraintes d’utilisation (min/max)
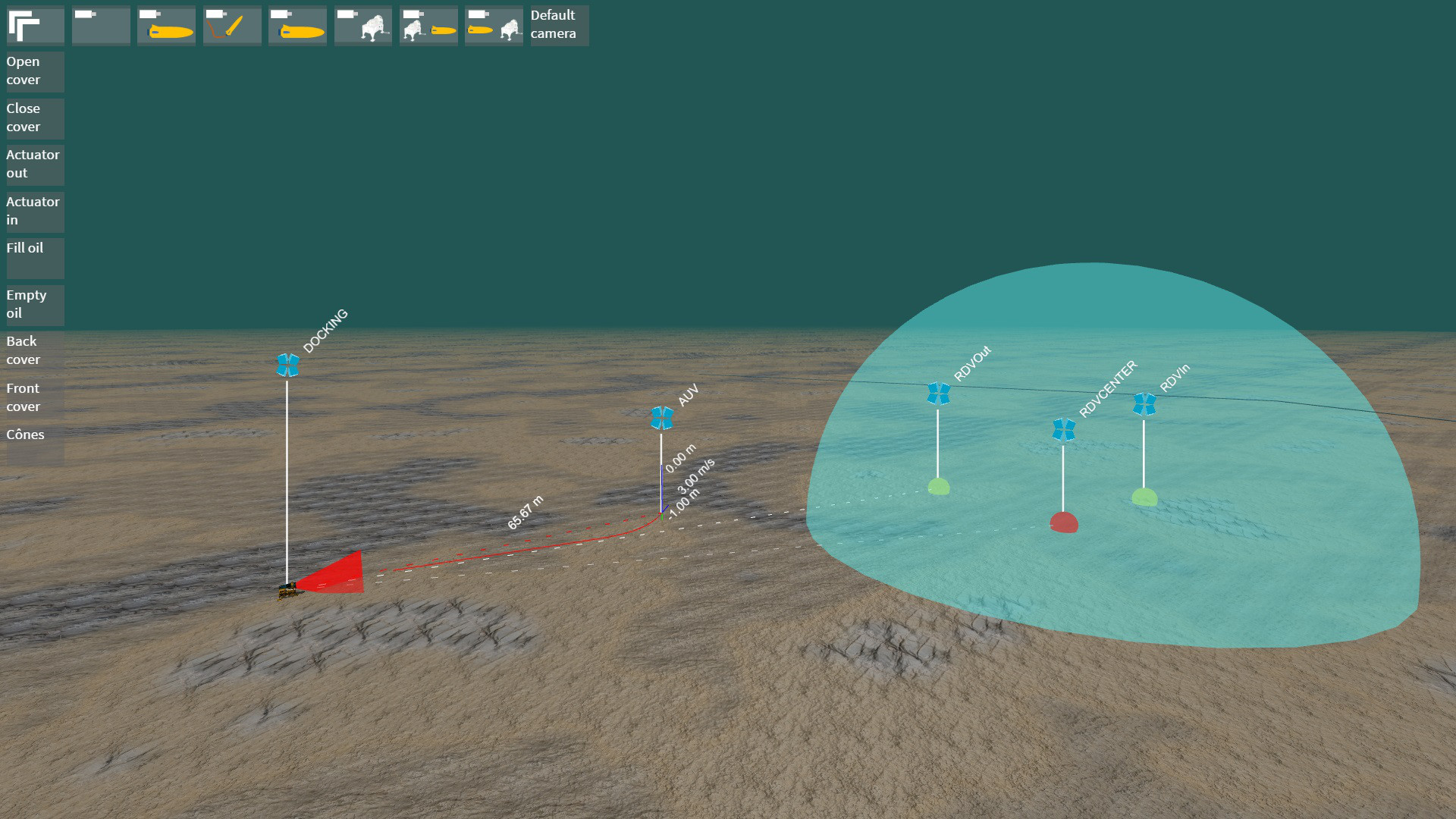
définition de la mission que doit effectuer l’AUV, de la phase de lancement à partir de la station de docking jusqu’à sa récupération. Cette mission est définie à partir de tâches de base :
suivi de waypoints
traitement de zones
Les tâches de ralliement et de docking sur la station sont déterminées automatiquement par l’outil en fonction du positionnement du début et de la fin de mission de l’AUV. Cette programmation prépare les phases de pilotage des séquences de la station de docking et permet de générer le plan de mission qui sera téléchargé sur le véhicule.