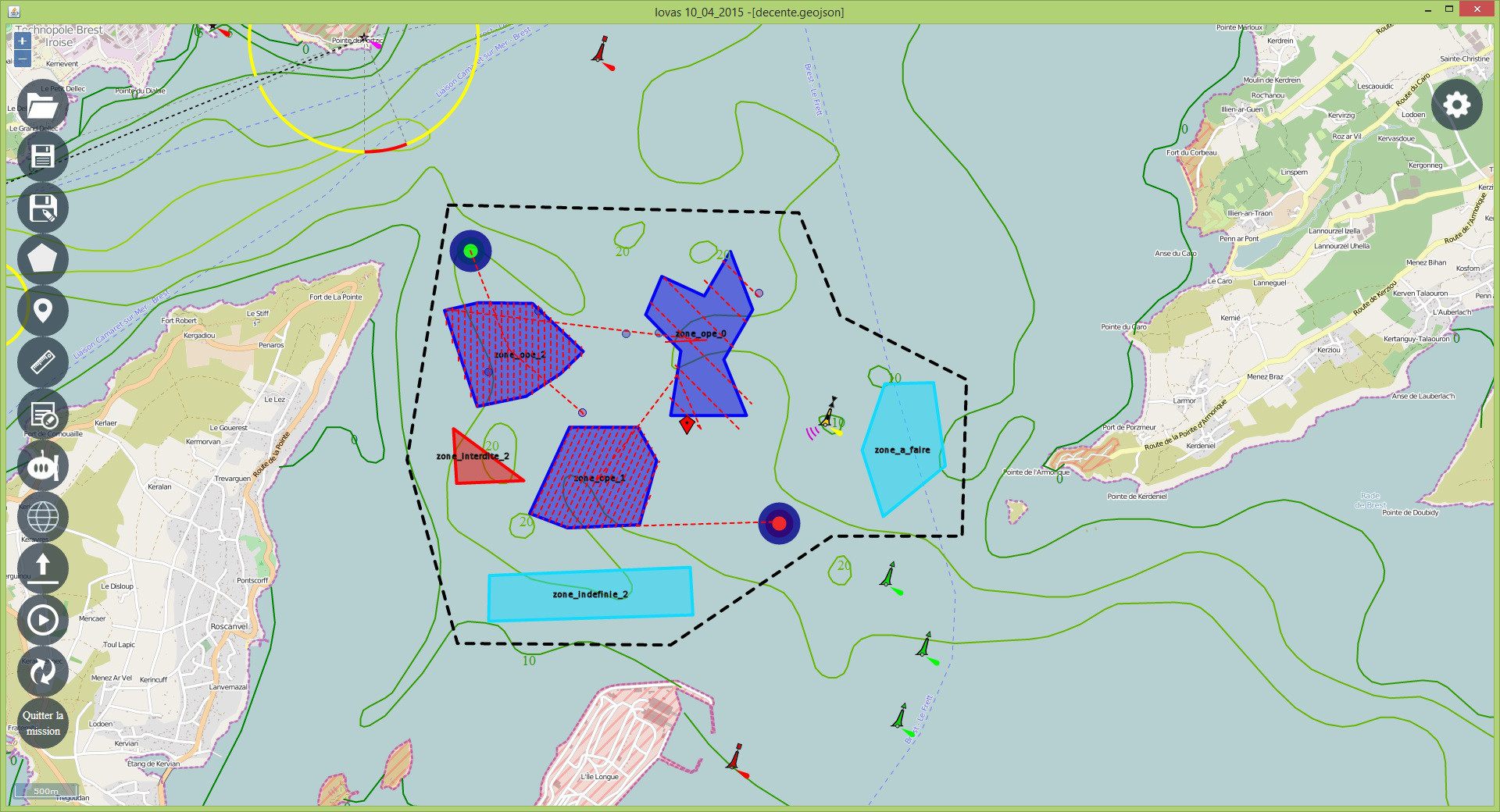
IOVAS (Interface Opérateur pour Véhicule Autonome Sous-marin) est un outil de préparation et de supervision de mission développé pour le compte du GESMA (2005 – 2013). IOVAS utilise les données d’environnement du Guide METOC (données du SHOM).
IOVAS permet de préparer la mission d’un AUV grâce à :
Enchainement de commandes
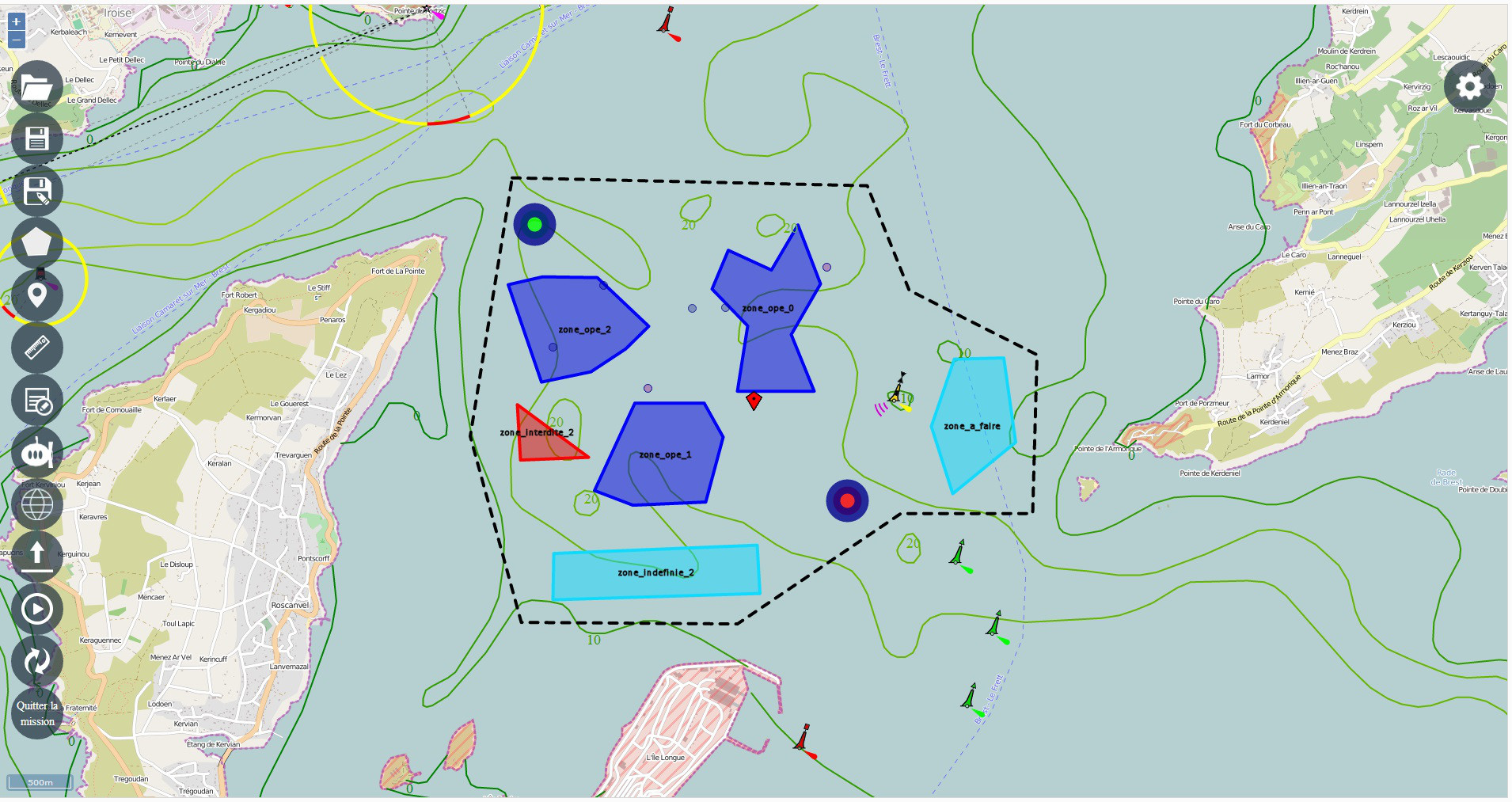
Zones de mission / zones interdites
Sélection des charges utiles / paramétrage
Sélection des opérations / charges utiles activées sur chaque zone
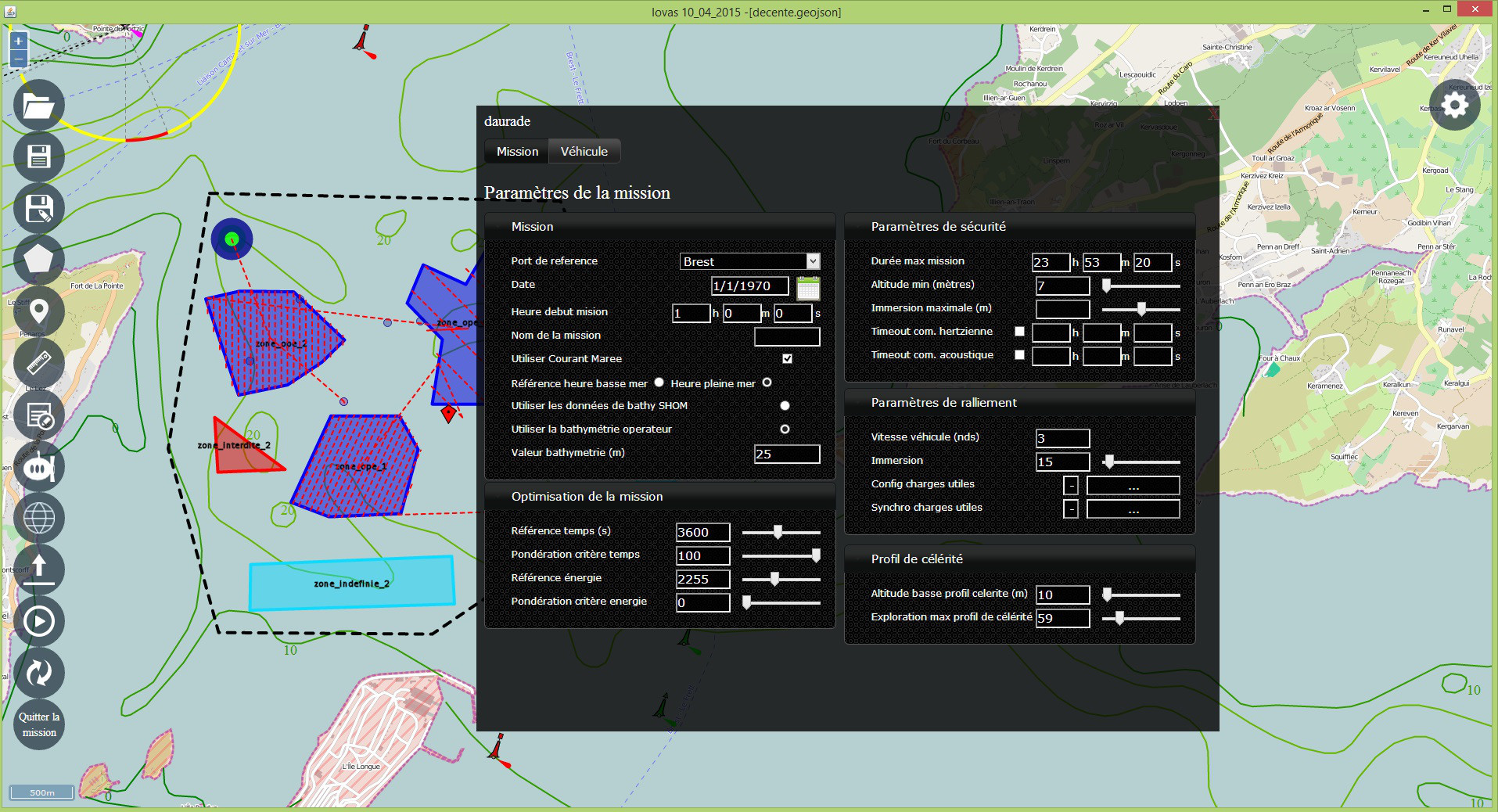
Les caractéristiques physiques (nominales, contraintes min/max) du véhicule sont définies :
Vitesses, accélérations
Rayon de giration
Immersion max
Altitude min
Etc.
Puis l’utilisateur définit la mission à l’aide de commandes, ou de zones. Chaque zone peut ensuite être associée à un ensemble d’opérations, elles-mêmes associées à un ensemble de charges utiles.
L’application permet à l’utilisateur de définir ses bibliothèques de commandes, de véhicules, de charges utiles.
L’utilisateur dispose par la suite de données d’environnement pour préparer sa mission :
Données du SHOM (Service Hydrographique et Océanographique de la Marine)
Traits de côte (Guide METOC)
Bathymétrie (Guide METOC)
Courants de marées (Guide METOC)
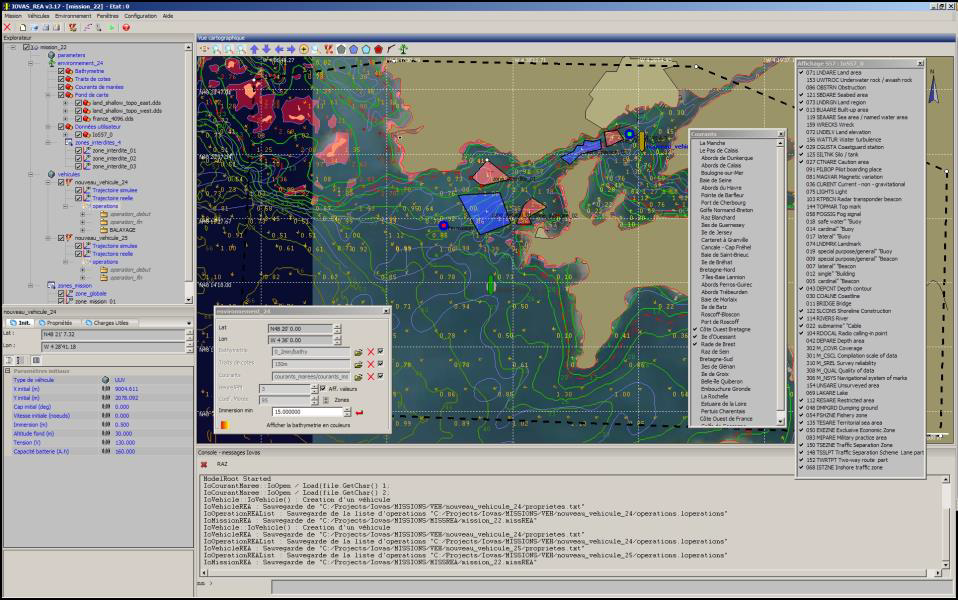
Les données SHOM sont chargée directement depuis l’outil sans interface nécessaire avec le Guide METOC.
Autres données :
Images géo-référencées (geotiffs, worldfiles)
S-57
AML (Additional Military Layers)
Performances / Qualité d’affichage
La cartographie repose sur une couche d’abstraction logicielle basée sur une API d’affichage accéléré
Système de chargement dynamique / multi-échelle des différentes couches de données
IOVAS utilise des algorithmes développés par l’ONERA (CERT), et génère un dossier de mission dans le format natif utilisé par les logiciels embarqués.
IOVAS permet de télécharger directement la mission dans le format de dossier de mission correct depuis l’interface vers l’engin.