IOVAS (Interface Opérateur pour Véhicule Autonome Sous-marin) is a mission preparation and supervision tool developed for the GESMA (2005 – 2013). It uses the environment data from the METOC Guide (SHOM data).
IOVAS allows to prepare the UAV mission by using :
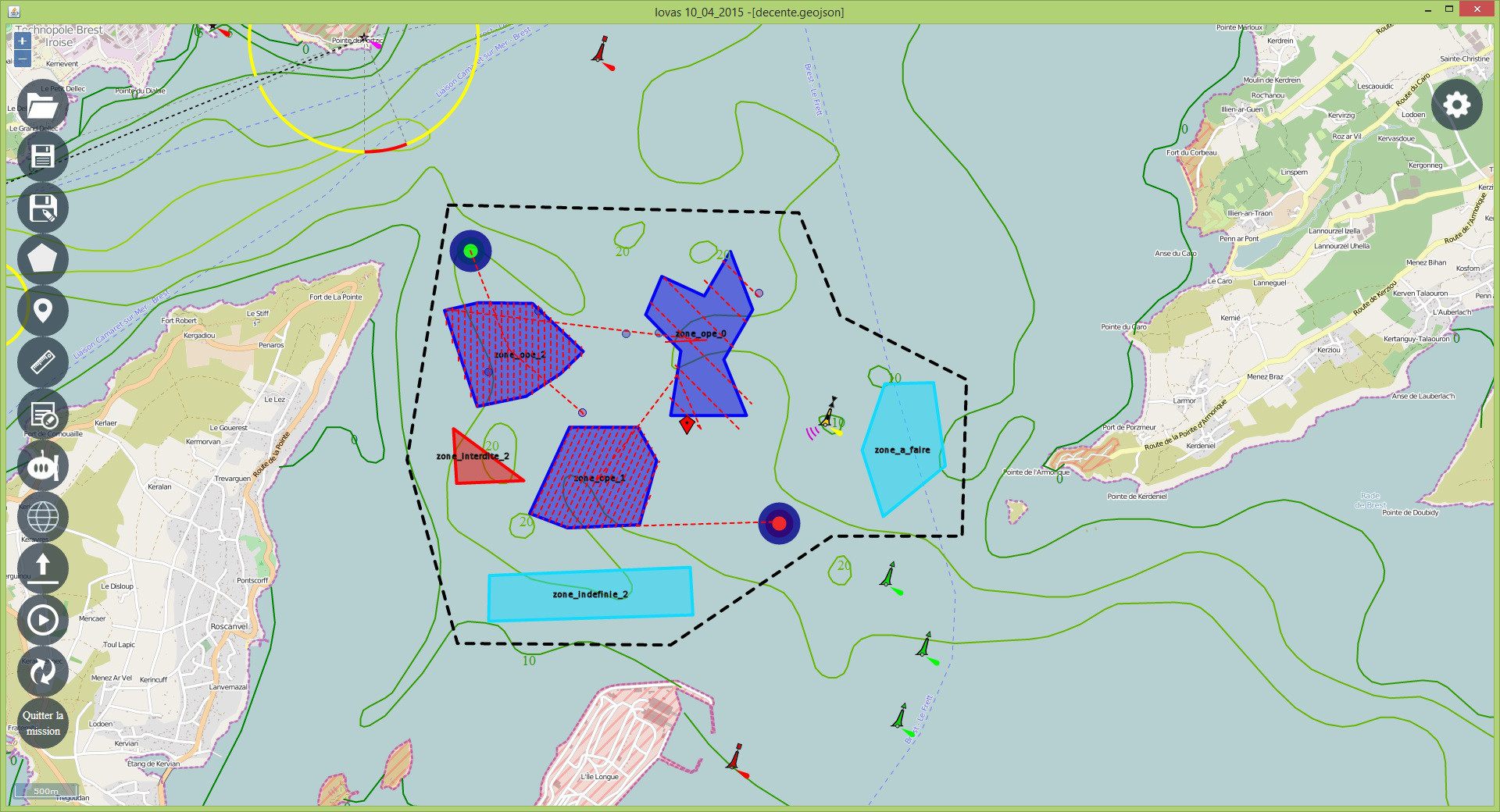
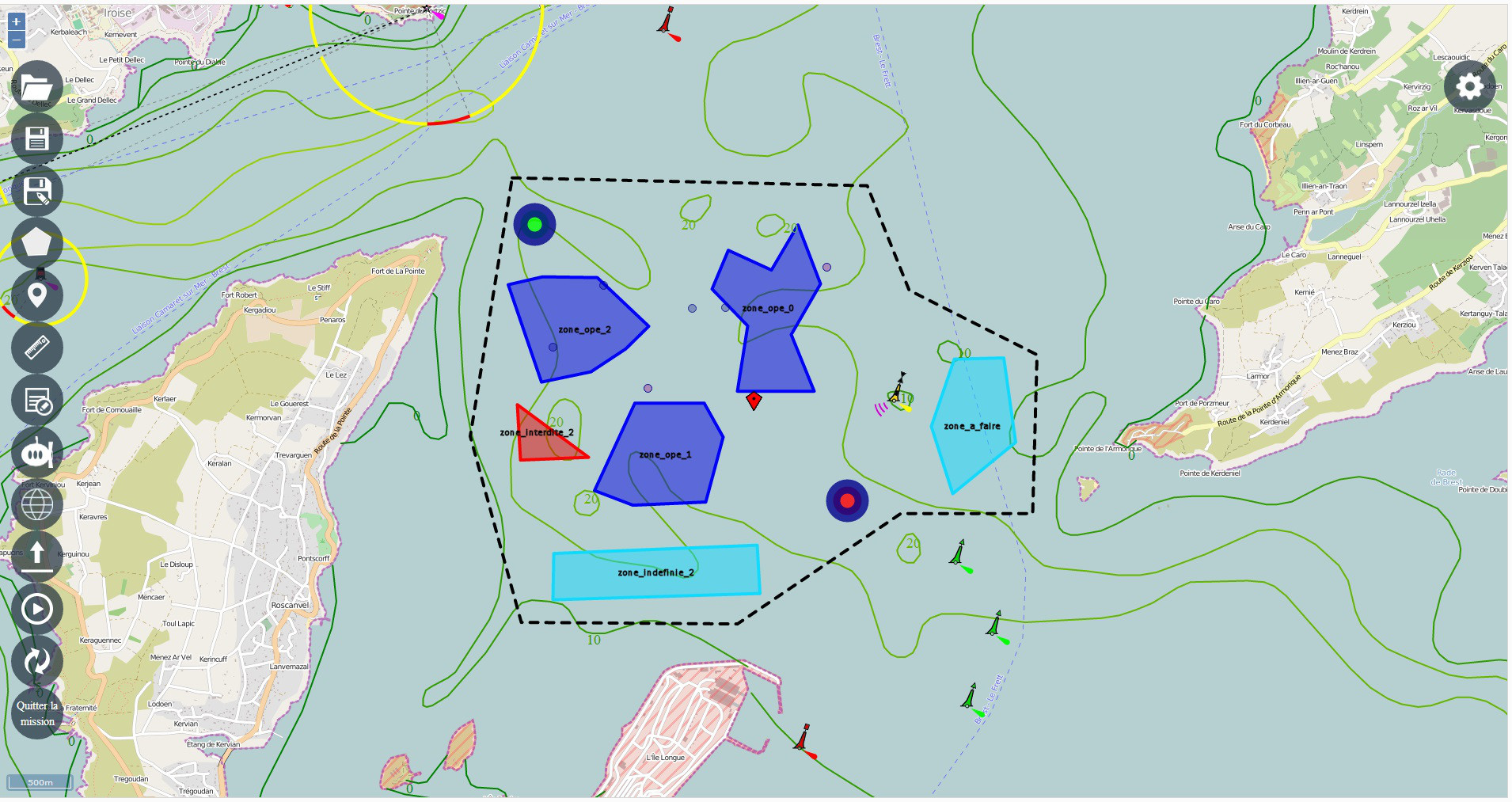
A series of instructions
Mission zones / Forbidden zones
Payloads selection / parameters
Operations selection / Enabled payloads on each zone
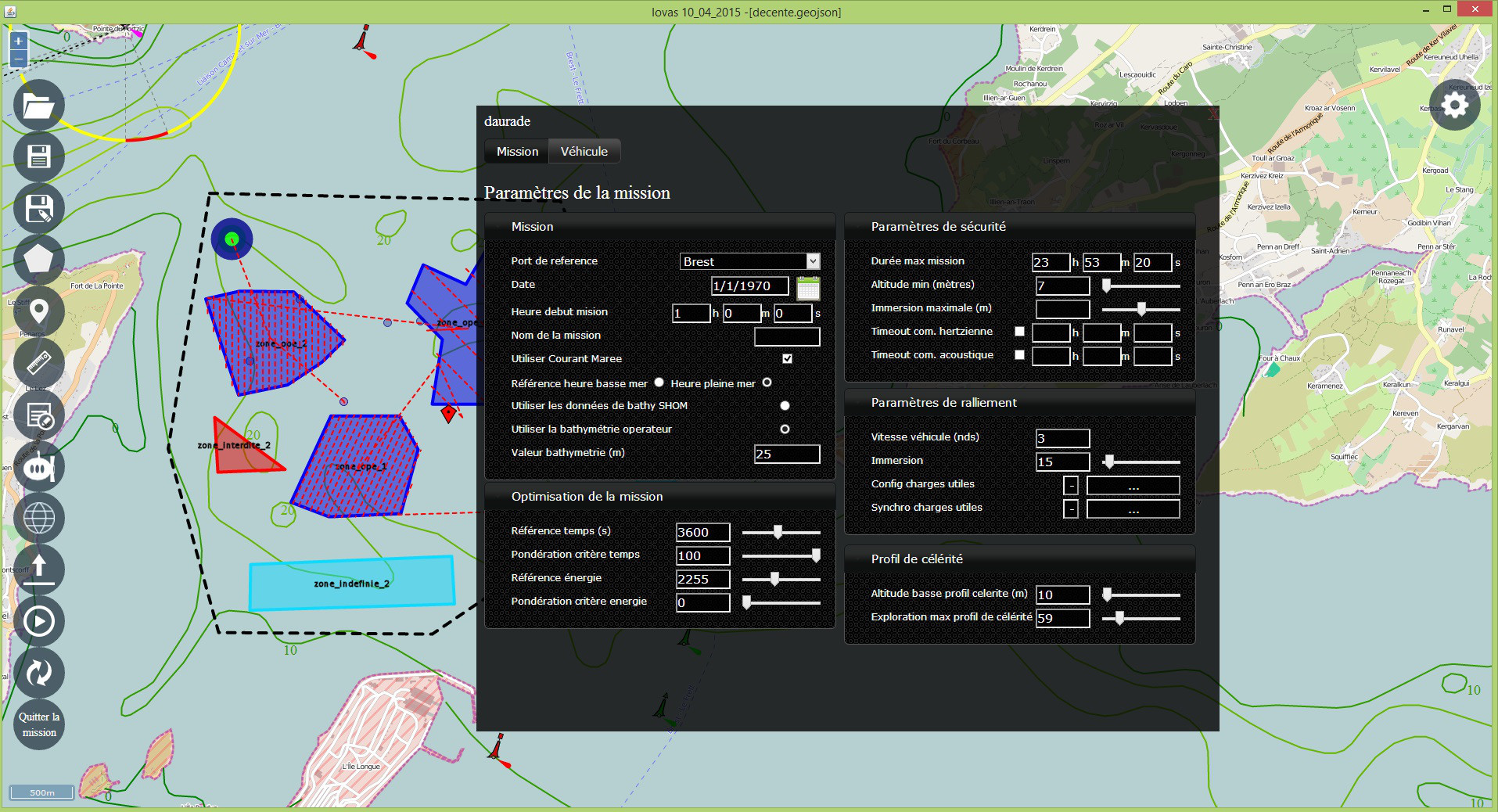
The physical specifications (nominal, min/max constraints) of the vehicle are defined :
Speed, accelerations
Radius of gyration
Max Immersion
Min Altitude
Etc.
Then the user defines the mission by using instructions or zones. Each zone can be associated with some instructions, and these same instructions can be associated with some payloads.
The application enables the user to define his instructions, vehicles and payloads libraries.
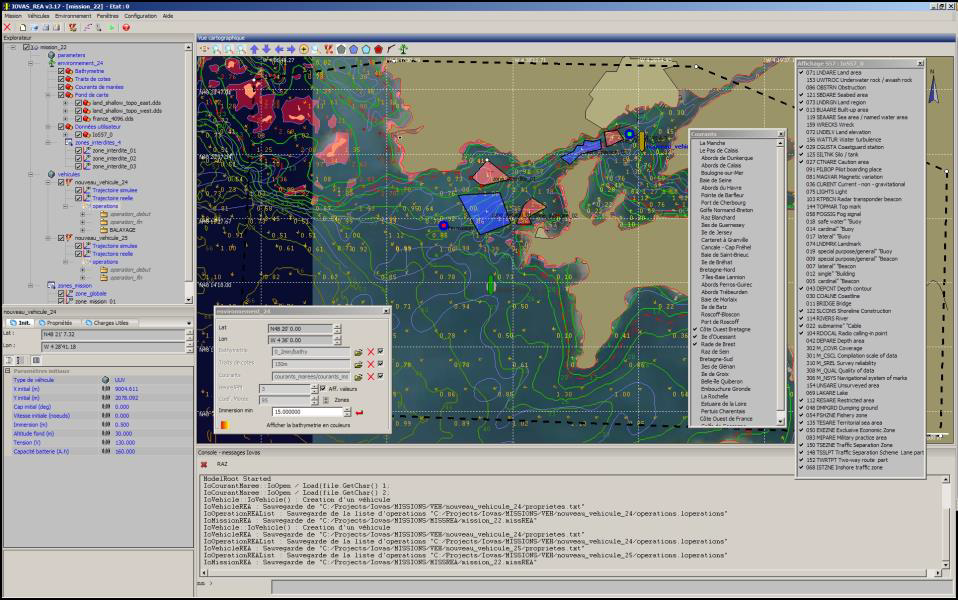
The user subsequently has environment data to prepare his mission :
SHOM data (Service Hydrographique et Océanographique de la Marine)
Shore features (METOC Guide)
Bathymetry (METOC Guide)
Tidal currents (METOC Guide)
The SHOM data are directly loaded from the tool without needing any interface with the METOC Guide.
Other data :
Geotiffs, worldfiles
S-57
AML (Additional Military Layers)
Performances / Display quality
The cartography is based on an accelerated display API
Loading dynamically / multi-scale on the different data layers
IOVAS uses algorithms developed by the ONERA (CERT), and generates a mission folder in the native format used by embedded softwares.
IOVAS enables to directly download the mission in the correct format from the interface.