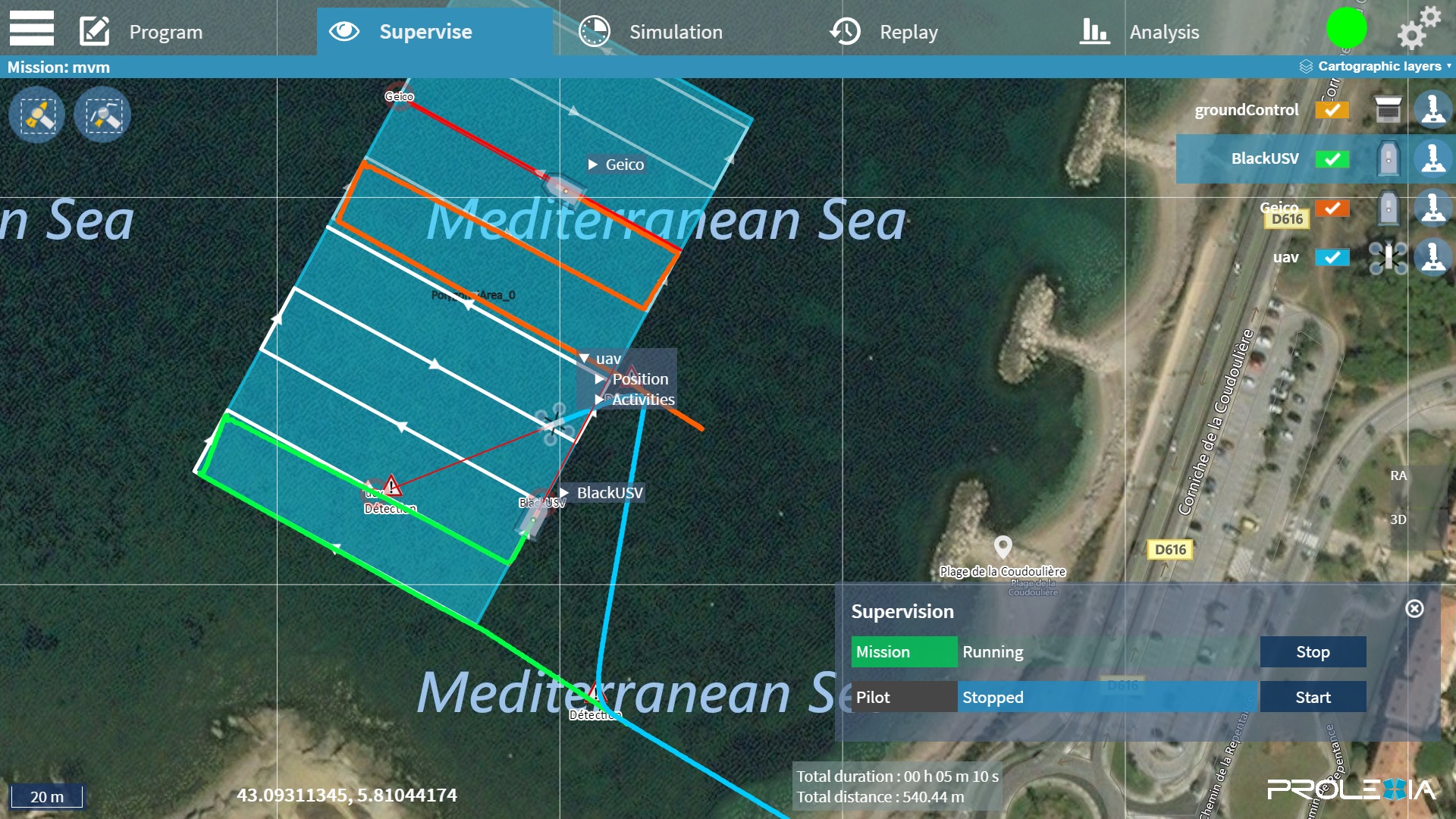
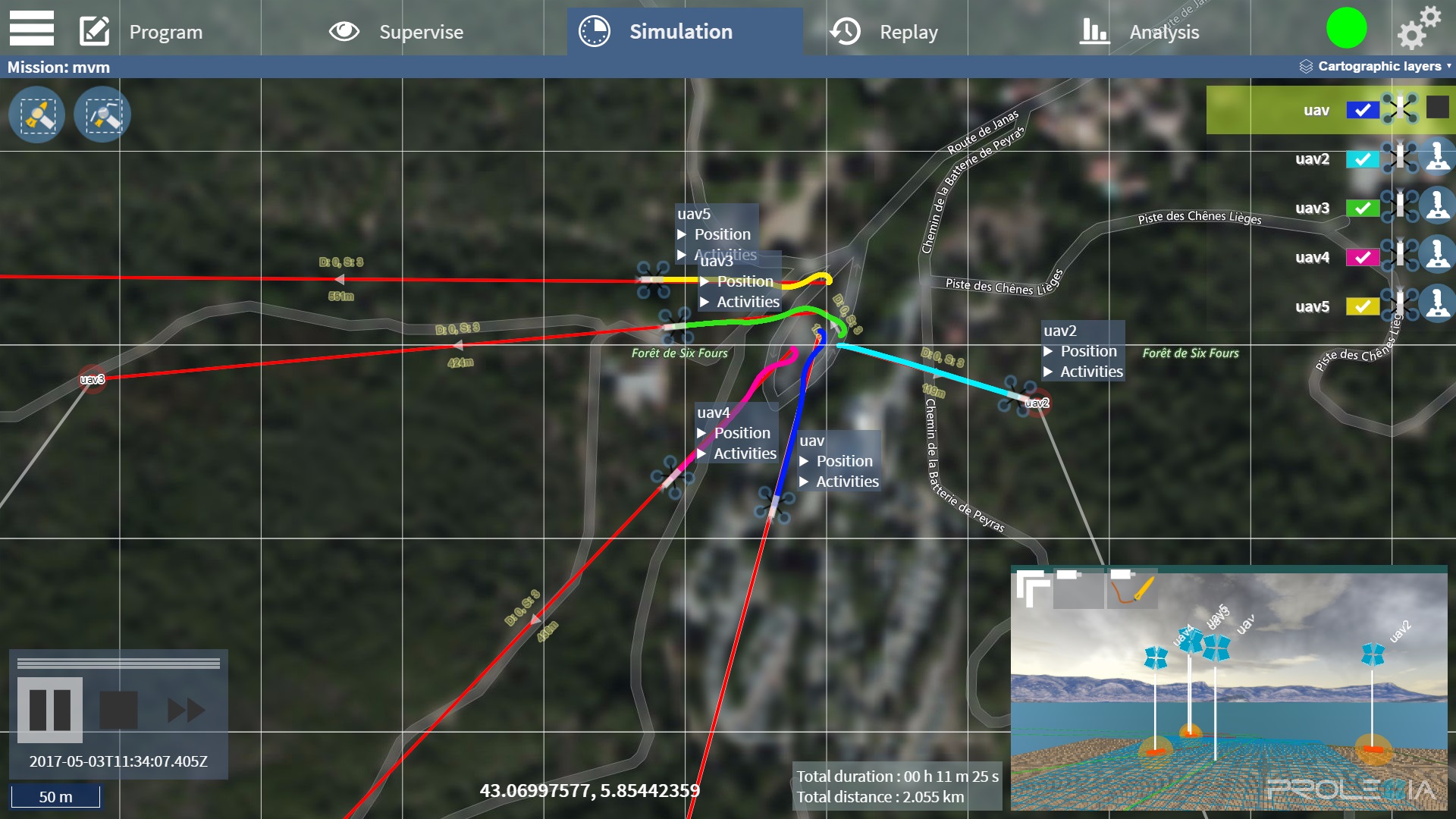
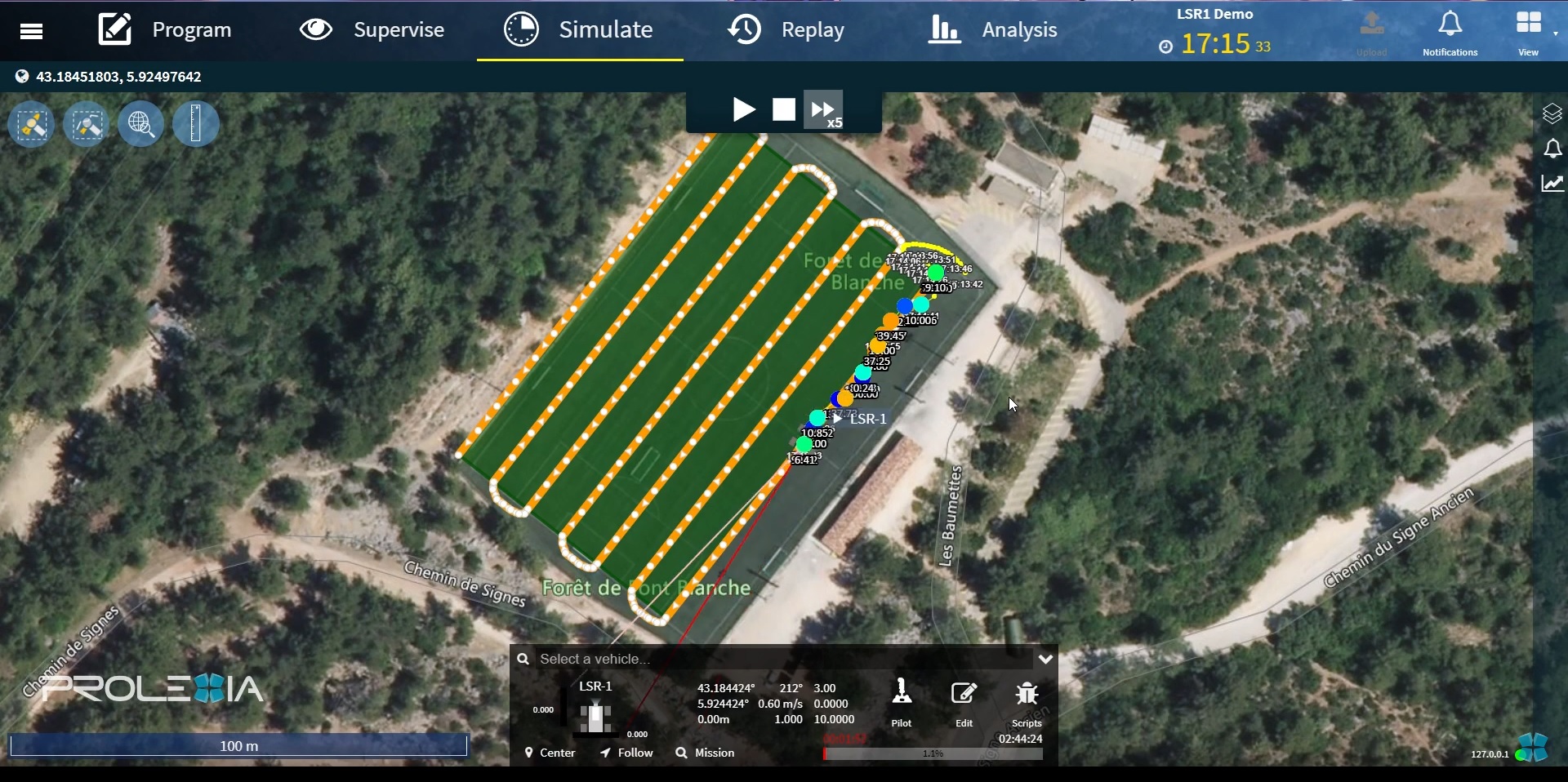
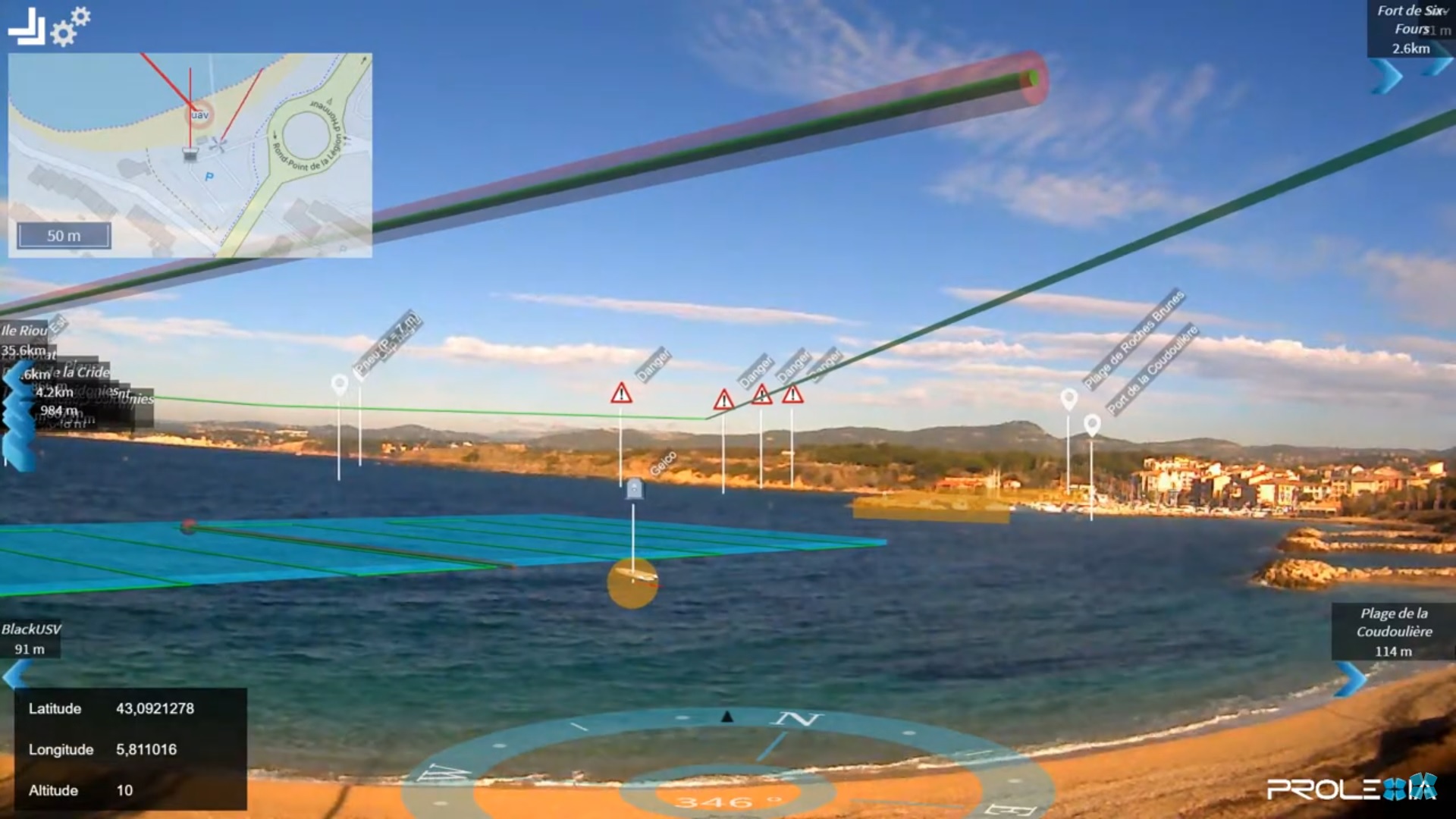
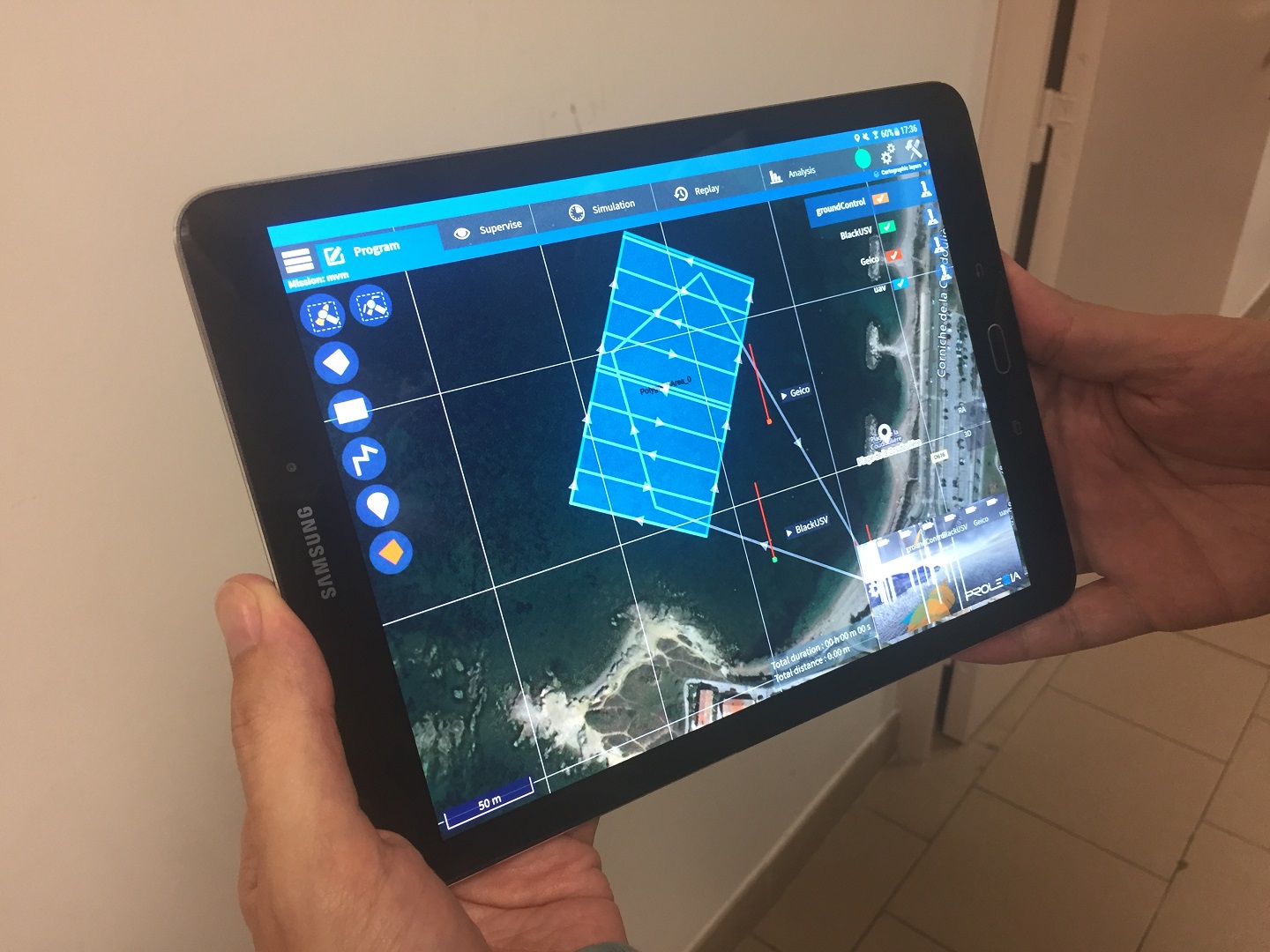
The Advansys MMS tool allows you to program, survey, simulate and analyze a mission that has been put into place with one or several types of autonomous vehicles such as AUVs, USVs, UGVs, or UAVs. The objective is to manage vehicle missions that have the power to intervene on surveillance missions, covering specified zones or environments, and perform maintenance tasks or complex maneuvers. The tool provides several modules: programming, simulation, supervision, and analysis which can be combined and adapted in order to fit your specific needs.
This tool automatically takes into consideration the constraints linked to the environment, the robot’s physical limits (such as speed), and its payloads.
Programming is defined through several steps:
Configuration of the participating robots in the mission: selecting and configuring payloads, energy management, defining the physical constraints (such as min/max speed).
Robot mission planning, from the launch phase until recuperation. This mission is defined by the following standard tasks :
Waypoint tracking
Zone processing (surveillance, search, measurements, etc.)
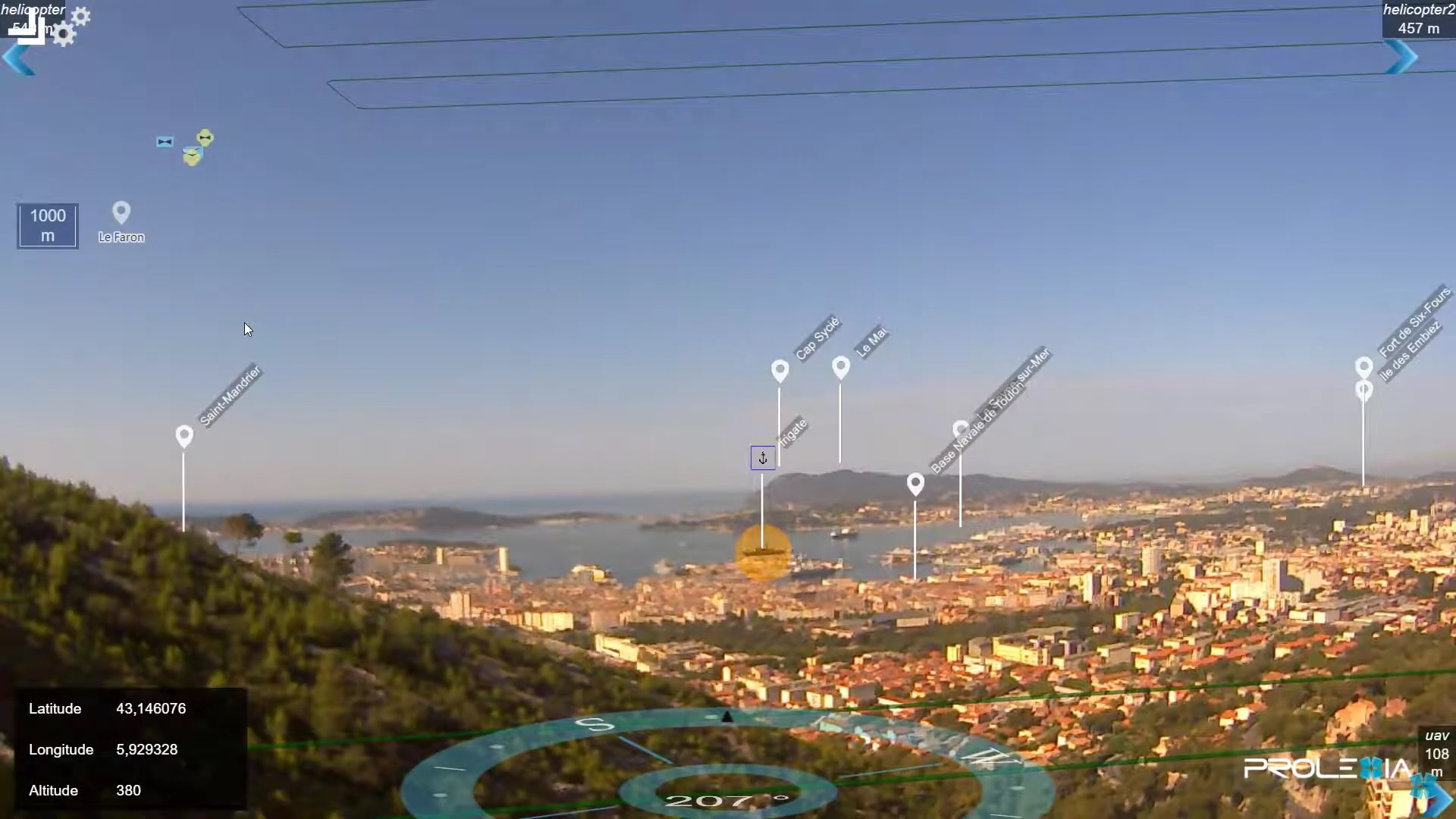
Video/Image capture
Object handling or gathering
Wall, hill, cliff, reef, or shelf tracking
Advansys MMS automatically calculates the transitionary tasks needed to execute the target mission. The mission is first generated and then uploaded to the designated vehicle.